

无人机多光谱遥感的类型(无人机多光谱相机RedEdge的波段配准方法(续1))
摘要:前文在概要叙述无人机平台上常见多光谱相机光学结构的基础上,对比了几何精纠正、空中三角测量以及虚拟摄影三种波段配准方法,选用虚拟摄影方法,在准地形无关条件下实现了1~2像元的配准精度。本文则在前文的基础上,进一步研究配准误差规律,探究误差源。
虚拟摄影方法假定相机不同镜头间的位置关系是固定的,同一摄站拍摄的五幅影像具有相同的曝光时刻。只有当相机的物理结构满足上述两个条件时,虚拟摄影方法才能得到精度足够高的配准结果。
通过处理一组由800幅影像(160个摄站)组成的实验数据,发现2号镜头(绿色波段)与其它四个镜头相比,具有更显著的拍摄延迟。图1是一副配准后的影像。

图1 配准效果图。红色(波段4)、绿色(波段5)、蓝色(波段3)
1:5放大效果如图2所示。
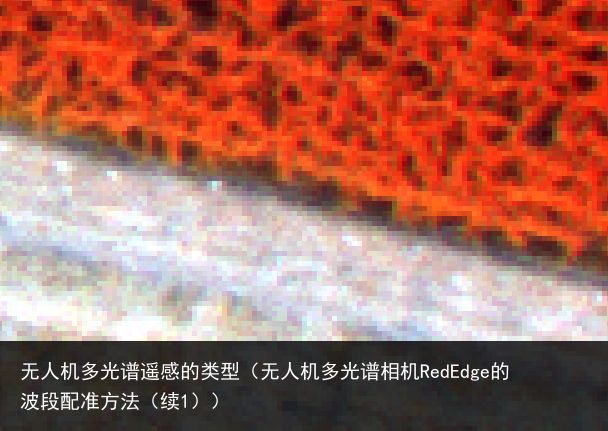
图2 放大比例1:5时的配准效果图。红色(波段4)、绿色(波段5)、蓝色(波段3)
观察图1、图2,总体看来,配准精度尚可,但仍存在少量配准误差。
为了进一步提高配准精度,首先采用最小二乘影像匹配算法,对连接点做了精化处理,然后通过光束法平差剔除了部分可能错误的匹配点,可认为虚拟摄影平差时所用连接点观测值中的误差为偶然误差。配准处理完成后,选取一幅影像中具有明显线状地物的区域,以目视判读的方式评价配准精度。为了便于对比不同波段间的配准误差,显示时绿色和蓝色通道均选取多光谱影像的第一波段,利用红色通道在显示不同波段时的色差观察波段间的配准误差。

图3 放大比例1:5时的配准效果图。红色(波段1)、绿色(波段1)、蓝色(波段1)
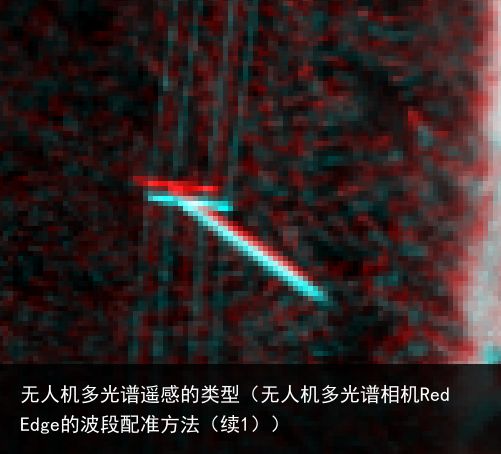
图4 放大比例1:5时的配准效果图。红色(波段2)、绿色(波段1)、蓝色(波段1)
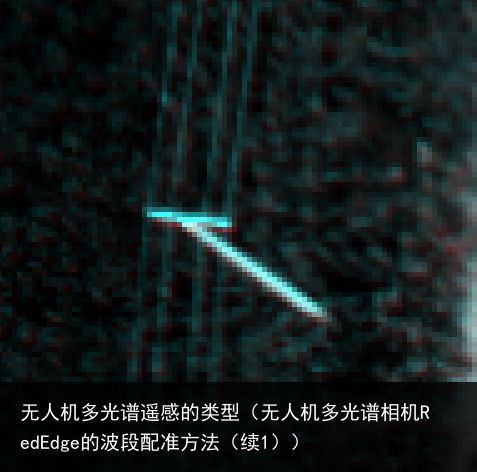
图5 放大比例1:5时的配准效果图。红色(波段3)、绿色(波段1)、蓝色(波段1)
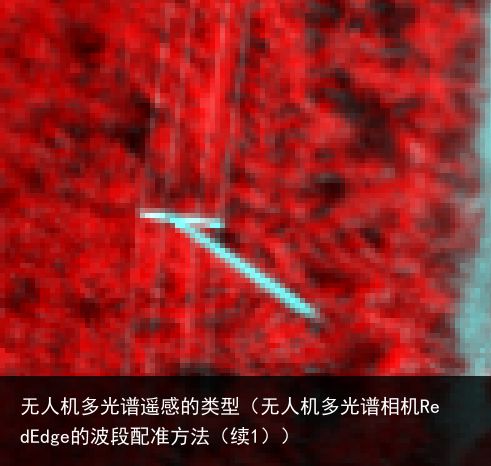
图6 放大比例1:5时的配准效果图。红色(波段4)、绿色(波段1)、蓝色(波段1)
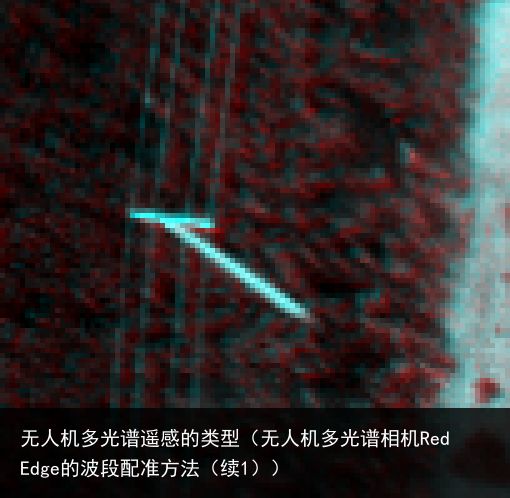
图7 放大比例1:5时的配准效果图。红色(波段5)、绿色(波段1)、蓝色(波段1)
对比图4~图7可以发现,波段2与其它波段间的配准误差较大,达到了3像元,其它波段间的配准误差较小,约为1像元。
观察其它摄站的配准结果,同样发现波段2与其它波段的配准误差显著大于其它波段间的配准误差。由此推测实验用RedEdge相机绿色波段对应镜头在曝光时存在不同步问题的可能性较大。
结论:在采用虚拟摄影方法对多光谱影像进行波段配准处理时,须满足虚拟摄影方法成立的基本条件,即:不同波段对应镜头间具有稳固的刚体连接关系,并且它们在成像时是同步的。实验中发现,波段2的配准误差明显高于其它波段,一种可能的原因是,相机曝光时波段2所对应的镜头与其它镜头不同步,成像时间差是随机的。我将选用另外一款多光谱相机,进一步对比分析,查找误差源。
后记:后续研究表明,配准误差并非由同步误差引起,波段2也不存在区别于其它波段的特异化性质。




