

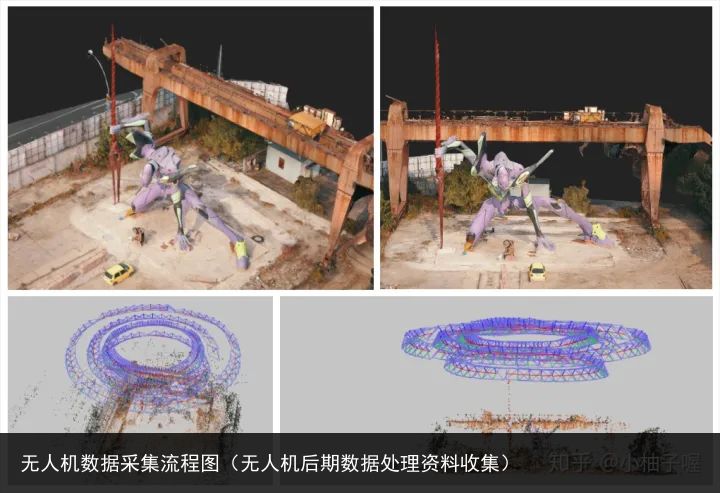
无人机数据采集流程图(无人机后期数据处理资料收集)
1)Altizure 航拍做成3D模型
https://site.altizure.com/earth?pid=5a76c07ac4eb6a6fd9a82340
摄影测量法
是香港科技大学孵化企业深圳珠科创新技术有限公司(Everest Technology Company Co. Ltd.)的主线产品,核心团队成员均由港科大教授、博士及硕士组成。
Altizure 是一个可以将无人机航拍照片转换成三维实景模型的平台。从最终输出的三维效果来看,Altizure 就一直深得众多无人机爱好者和专业用户口碑上的好评。
跟 Pix4D 一样,Altizure 也把数据获取和处理分流到不同产品上运行:

Altizure app:也就是 Altizure 的移动客户端。功能上主要也是用于无人机数据采集的路线规划,同时 Altizure 也允许用户通过客户端上传不超过 1000 张的图片至服务器进行建模。
Altizure web:Altizure 允许你通过网页端单次上传不超过 1000 张的图片(超过 1000 张浏览器可能会崩溃)至服务器,上传完成后,服务器便会自动对这些图片进行建模处理,。
Altizure Desktop:用于离线展示,同步 remote 数据后,便可以在桌面端查看、测量和标注自己项目的建模结果(比如浏览测量结果)。
在网页端新建一个项目时,Altizure 会提示免费项目用户有 3GP(3 gigapixels)的免费额度,这代表着,免费项目能上传的照片总像素要低于 30 亿像素,按每张张片分辨率 4000 x 3000(1200 万像素)来计算,就意味着最多可以上传 250 张 1200 万像素的照片。不过按照 Altizure 的运营策略,如果你上传的建模项目入选了编辑精选,你的免费额度便会相应的提高。而对于专业用户来说(比如有下载模型结果需求),则可根据自己的项目的大小购买的相应的 Alticoin。
为三维建模采集航拍数据有几个基本的原则:
图像精度越高三维效果越好。飞得越低,相片分辨率越高,CCD幅面越大,自然获取的三维结果更好。同时图像的三维效果比视频要好。
飞机要动起来。切忌定点转动相机像拍摄全景图一样拍摄单独一组图像。一定要移动飞机拍摄多组图像。
相片之间的重叠度要大,70%是基本,80%~85%左右最佳,90%以上的话太浪费图像了。
有两种基本拍摄方法,绝大多数的场景均可通过这两种拍摄方法灵活组合而完成拍摄。两种方法分别是:
环绕飞行。如使用大疆无人机,推荐使用 DJI Go 的定点环绕飞行来拍摄。
折线飞行。如使用大疆无人机,推荐使用 Altizure 来拍摄。
下面我们会详细讲解这两种拍摄模式。
a环绕飞行
环绕飞行,顾名思义就是绕着要建模的物体做环形飞行,并让相机对准被建模的主题进行拍摄。这种拍摄方法特别适合对单栋建筑或者标志物的拍摄,三维重建效果好,同时所需的图像也很少,非常经济实用。以下就是一个环绕飞行拍摄单栋建筑的例子:
如果建筑物比较高大,还可以采取多层环拍,保证楼顶和楼底都能被高精度的图像覆盖。例如:
b折线飞行
折线飞行顾名思义就是让飞机走之字型的路径,扫描整个要拍摄的区域。这种方式比较适合拍摄大面积的场景。
以下就是一个折线飞行覆盖一片区域的例子:
c综合应用
这两种基本飞行模型各有其优缺点,在实际使用中必须灵活应用以达到更佳的效果。例如这个案例,作者使用了折线飞行覆盖大面积的场景,再使用了环绕飞行重点拍摄了主要建筑。
飞行高度与地面精度 地面精度主要衡量标准是地面采样密度GSD,其单位是厘米/像素。对于同一款的相机,飞行高度越低,地面精度越高,三维重建的结果就更加细致。下表给出了在70%重叠度的条件下,以5、10或20 GSD采集一平方公里所需的相片数目和飞行高度。
d飞行轨迹 飞机需要按图示折线路线飞行覆盖目标区域。飞行轨迹需要比实际采集区域外扩些许。外扩距离等于飞行高度。例如飞行高度为100米,则需要外扩100米。
e图像重叠度 航向和旁向的图像重叠度需要至少70%。为了保证最佳的三维效果,请拍摄航拍照片,而不是航拍视频。
f拍摄角度 除了让相机垂直于地面拍摄图像,还需要让相机倾斜与垂直方向成30~40度角,并且在东南西北四个方向上拍摄倾斜图像。
https://site.altizure.com/support/articles/tutorial_capture
2)pix4D
蓝色球体显示的是每张照片的全球定位系统数据报告的拍摄地,绿色球体显示的是图像数据处理后计算得出的全球定位系统坐标。
PIX4Dmapper
2011 年从 EPFL(瑞士洛桑联邦理工学院)计算机视觉实验室起家,凭借着坚实的技术将业务拓展到法国、美国和中国,并分别成立办事处。

上图展示的是 Pix4D 的工作流,所以这里介绍的 Pix4D,其实是一整套 Pix4D 系列的软件,包括了 Pix4Dcapture 移动端、Pix4D Desktop 桌面和 Pix4D Cloud 云端。完整的流程下来,Pix4D 可以对无人机所拍摄的图像作体积计算、等高线、三维点云、数字表面模型、正射影响镶嵌图、三维纹理模型等处理。

Pix4Dcapture:可免费下载使用,功能上跟绝大多数航线规划软件相似。连接上无人机,选
定区域(可设定不规则的形状)和设置航测高度后,便可让无人机自动执行任务。
Pix4D Desktop:Pix4D 重要的收入来源,可免费下载,但软件会设定试用期限。桌面端软件可以对从 Pix4Dcapture 获取到的数据进行(离线)处理。官方默认提供 Windows 的安装包,对于 macOS 的用户来说,也可以参考这个链接 https://pix4d.com.cn/cloud/index.php/s/Z9Dkv76nr99LKM3下载 beta 版本。
Pix4D Cloud:捆绑着 Pix4D Desktop 一起销售。作用在于,一是用于让获取到的数据放在云端处理(免去对本地电脑性能不足的担忧),二是方便存储和展示拍摄数据、输出结果。
除了对软件工具的提供,Pix4D 还配备了技术支持、社区问答等售后服务,整体来说,这是一套典型的国外商业软件服务。价钱方面,官网提供的 Pix4Dmapper 专业版年租价为 3500 美元(约合人民币 23082.5 元),至于国内代理价和淘宝「特供价」,这里就不多叙述了。
3)dronedeploy
一家致力于为无人机提供软件解决方案的创业公司,位于旧金山,在其 B 轮融资中,融资规模达 2000 万美元。

DroneDeploy 和 Skycatch 一直是无人机软件界的「融资标杆」,B 轮 2000 万美元级别的融资金额让行内外人士都重新审视无人机软件背后的商业价值。在产品数据方面,DroneDeploy 用户分散在超过 150 个国家并已经测绘超过 1000 万英亩的土地。
DroneDeploy app:用户可以在 Google Play 或美区 App Store 下载 DroneDeploy 的客户端版本,进行航线规划、浏览已经建好的交互式地图或 3D 模型。
DroneDeploy web:有 30 天免费试用期,可供用户上传航拍照片进行处理,除了可以各种测绘模型,还可以选择 NDVI、VARI 等算法查看图像中农作物的健康状况。
App Market:这是 DroneDeploy 的「核竞」所在,也是让它区别于其他航测软件的重要功能。用户可以根据自己的场景和专业领域在 App Market 里下载使用相应的软件(云服务),并在 DroneDeploy 上运行,比如用 WhiteClouds 对无人机地图进行 3D 打印、用 EZRoof 检查房屋屋顶或用 AgriSens 对农作物进行分析。

对比前三款航测软件,DroneDeploy 更接近于一个云服务平台,航测只是它其中一项云服务。为了搭建这个平台,DroneDeploy 也专门提供 API,供第三方开发者、服务商接入到平台上,分发免费或收费的软件。不过 DroneDeploy 在中国的本土化问题也挺让人头疼,一是网络接入的速度较为缓慢,二是在地图信息上还比较老旧。
4)Autodesk 123D catch
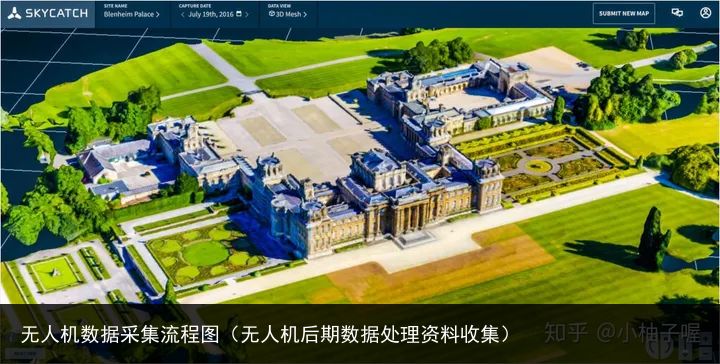
5)Skycatch
一家无人机数据采集公司,位于旧金山,在其 B 轮融资中,融资规模达 2200 万美元。
早期的 Skycatch 的工作是在高空中采集高清的图像和视频信息,客户只要到 Skycatch 的软件平台上指定自己需要采集的数据,Skycatch 就可以自主规划如何完成任务并将数据传回给用户——他们的业务主要集中在建造业、矿业、太阳能行业以及农业,在矿业,采矿公司可以实时的追踪他们挖到的矿产数量,并对原矿石进行质量评估,及其对其他方面的数据进行实时分析。

后来他们也推出了自己的航测软件套装,供无人机用户使用:
Skycatch app:手机客户端的用途是连接无人机,所以 Skycatch app 也跟上面两款一样,负责航线规划和数据采集的部分。
Skycatch dashboard:同样是把采集回来的数据,移至网页端进行操作。
其实在软件上,Skycatch 跟上述两款软件并没有形成太大的差异化,不过其 B 轮显眼的融资金额还是能给无人机从业者一个新思路:无人机要赚钱,不一定只靠卖硬件。
6)Datumate
以色列 Datumate 公司推出的测绘软件,并于 2016 年与大疆合作推出无人机测绘套装
Datumate 专业测绘套装是全面而专业的影像处理和制图工具,其测绘级的精度,让它适用于基础测绘、建筑、基础设施和工程巡检等领域,可以用于地形图,工程竣工,库存体积,道路,桥梁与铁塔、建筑外立面等方面的测绘。

DatuFly:测绘套装里负责航线规划和自动飞行软件,获取测绘区域的航拍图像。
DatuSurvey:桌面端软件,也是对航拍图像作建模、点云、量测、制线等处理的工具。
DatuSite:通过空中和地面图像生成 3D 点云,建立三维模型,生成地图,计算容积并生成报告。可快速且准确的监控施工场地,分析竣工场地并检验基础设施和公用事业。

Datumate 套装(这里指 DatuSurvey 的专业版)的亮点在于其高精度,用户可以直接在输出结果上绘制线划图,并且其输出的 DXF 格式文件可以导入到各种 CAD 软件中,可谓建筑、工程类专业人士的好助手啊。
7)Site Scan
大疆昔日对手 3D Robotics 的转型之作,主打企业服务市场。

企业用户可以在工作场地使用这个系统进行自动化任务执行和处理,通过这套系统处理的数据将被存储在 3DR 的云端上,随后便会将数据发送给 Autodesk 云进行数据分析。值得一提的是,Site Scan 也支持大疆的精灵 4 Pro。
8)Mesh
一款主打协同工作流的无人机软件
通过移动终端和无人机的多种通讯模块,Mesh 可联动空中及地面的设备,实现实时协同操作、共享图传、实时同步数据分析等多平台实时协作。Mesh 内置各个行业的智能任务包(Mission Package),可用于航测领域的 2D/3D 建模、电力行业的电网巡检、建筑行业的工程监管等等不同场景和需求。

Mesh app:通过手机或平板电脑连接无人机,根据需求选取 Mesh 内置智能任务包后起飞,并根据预设的航线规划自动采集数据。
Mesh Desktop:配套的桌面端软件可方便管理和处理数据。

除了提供自动飞行采集的模式,Mesh 还可以通过共享航拍影像、多人分工操控无人机的方式来完成一些特定航拍数据的采集或实时分析。当然,这也对网络稳定性和传输速度的要求也不低。
相信看到这里大家也会发现,目前主流的无人机航测软件通常包括基于手机、平板客户端开发的数据采集部分和基于 web 端和桌面端开发的图像处理部分。而在数据采集部分,核心功能依然是航线规划,已成为无人机航测软件的标配,除上述软件以外,我们还能找到类似 DJI GS Pro、Litchi、Autopilot 等飞控软件完成数据采集。真正令航测软件形成差异化的是在数据处理的部分,优秀的处理算法会输出优秀的测绘建模效果,而以上 7 款软件算是无人机航测方面的佼佼者,大家有条件的不妨都试试,对比一下输出效果。
如果大家有更好的推荐,不妨到文章下方留言评论噢。另外,自家团队有开发相关的产品也可以在评论区里留言,或者在公众号(id:dronedev)对话框里直接联系钟德夫。
9)Drone2Map for ArcGIS
自动拍摄—快速传拍摄的照片Share drone imagery fast—use frone2map with other ArcGIS Apps
无人机和GIS完美结合成果
1、准确的航飞数据需求
无人机技术可以大大提高GIS专业技术人员的工作效率,无需任何的无人机操控技能就能够为一个中小型作业区域获取高质量的航拍影像,并可以把他们转换为所需的2D和3D成果。
作为一种新的光栅数据的采集方法,无人机技术是卫星/载人飞机数据采集技术的有利补充,虽然覆盖率低,费时,但是能获取高分辨率的数据。
从交货时间的角度看,无人机现势性强,随心所欲想飞就飞——收集地理图像需要没有像有人驾驶飞机或卫星图像需要等待,还有各种因素的影像,如天气,时间差异,成本问题。做一个飞行计划,采集影像数据,处理数据,从开始到结束可以在一天内完成。
在分辨率和系统方面,所能达到的精度大约1-3X GSD,或者是每个像素达到1.1厘米,明显高于当前卫星和载人飞机可以达到的分辨率。
另外,由于无人机的飞行高度的原因,没有云层遮挡,受天气影像更小,这就意味着较少的天气延误还有更小的不可用的照片。
无论你是哪个领域——林业,资产管理,环境保护,农业,遥感,石油和天然气,无人机都能够为您提供实质效益,提供准确的数据,快速且低成本。



