

无人机航拍农村房子干嘛(无人机农村宅基地高精度确权应用)
引言
近年来无人机的快速发展使其在测绘、农业、电力、军事等领域取得了广泛的应用。特别是在航空摄影测量中, 无人机已成为十分重要的数据获取平台。在小区域大比例尺测绘中, 无人机具有明显的优势。与传统有人驾驶航测飞机相比, 无人机大比例尺测图具有以下显著特点: ①数据获取成本较低, 具有明显的价格优势; ②成图周期短, 由于无人机起降灵活、对保障条件要求较低等, 可以快速获取任务区域影像; ③适合于零散小区域测图, 在土地确权、新农村建设等应用中通常是比较理想的选择[1,2]。国内外众多学者围绕无人机摄影测量开展了大量的研究工作, 研究的重点已经从可行性研究转移到如何提高无人机摄影测量的精度上来。
2013年以来国家开展农村土地确权工作, 对宅基地、耕地等开展确权登记, 其中十分重要的一项工作就是进行全国范围内的宅基地普查测量工作。由于工作量大、时间紧, 如果完全依靠全站仪、实时动态测量(real time kinematic, RTK)等人工测量手段, 不仅成本十分高昂, 工期也将大大延长。而采用无人机航空摄影方式, 则可以大大提高工作效率, 降低测图成本。与地形图的测图要求不同, 宅基地确权仅需要获取农村建筑物的平面坐标, 不需要其高程信息。
为了对无人机大比例尺测图的精度进行评估与验证, 本文开展了基于简易无人机平台的小区域大比例尺测图的试验研究, 分析了影响无人机低空摄影测量精度的主要因素, 并给出了提高无人机低空摄影测量精度的建议。本研究中, 无人机上搭载的是未经过检校标定的普通数码相机, 而且是仅利用航摄区域的影像和少量地面控制点信息进行测图。
1 无人机影像获取
1.1 飞行平台
本研究采用厦门市无人机遥感工程应用中心研发的某型电动无人机进行土地确权精度验证试验。飞机平台如图1所示。

图1 无人机平台
该型无人飞机续航时间为90 min, 弹射起飞, 伞降回收, 翼展2 m, 起飞重量7 kg, 通讯控制半径10 km。搭载相机为SONY NEX-5T, 图像分辨率为4 912像素× 3 264像素。
1.2 无人机影像
试验区域位于河南省鹿邑县, 共飞行10条航线, 相对航高400 m, 地面分辨率约0.05 m, 影像的航向重叠度约为70%, 旁向重叠度约为35%, 去除起飞降落、航线转弯等共获取有效影像392幅。影像分布及重叠情况如图2所示(颜色代表影像的重叠度)。
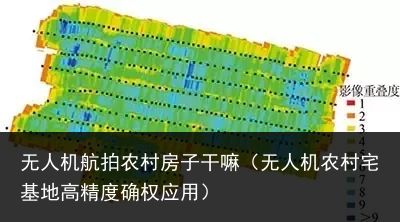
图2 影像分布示意图
与传统的航测飞机相比, 无人机的载荷有限, 加上成本的因素, 不能搭载专业的POS设备, 因此获取的影像不带有位置姿态信息。所用相机也是消费级的数码相机, 畸变较大, 且事先未进行相机检校。加上无人机的体积小、重量轻、抗风能力差, 航线重叠不规整, 影像的姿态角变化较大。
1.3 地面控制点及检查点
为了进行光束法区域网平差以及精度验证, 在飞行区域利用RTK测量了11个地面控制点/检查点。点位测量精度为厘米级, 点号(图中数字)和分布情况如图3所示。

图3 外业测量点分布示意图
2 无人机影像宅基地确权实验
由于无人机上仅有用于飞行控制的导航设备, 无法获取影像内外方位元素的近似值, 传统航空摄影中的假设条件不再成立, 因此不能采用数字摄影测量的理论和方法对获取的无人机数据进行处理。
2.1 运动推断结构
运动推断结构(structure from motion, SFM)是计算机视觉中重要的理论, 其核心思想是利用从不同角度拍摄的具有重叠的影像恢复出相机的位置姿态(运动)和场景的三维结构(结构)。在这个过程中仅需要利用影像本身, 不需要其它先验信息, 适合于处理简易无人机获取的影像数据[3]。
SFM技术的一般路线是先通过两帧或三帧进行求解, 以代数初始化射影空间上的三维结构和摄像机运动参数, 然后通过自定标技术将其转换到度量空间, 获得度量空间上的重建, 主要包括特征点匹配跟踪、摄像机内参标定和外参求解等几个模块, 其流程如图4所示。

图4 SFM主要流程
通过运动恢复结构得到的影像位置姿态是在局部空间坐标系中, 还需要借助地面控制点将其转换到绝对坐标系中。本研究从11个野外实测点中选择6个作为控制点进行区域网平差, 剩余的5个作为检查点进行精度验证与评估。

2.2 相机焦距f自检校实验
如前所述, 未经检校的非量测性相机的镜头畸变比较大, 会直接影响获取的内方位元素和定位的精度。为了分析影响定位精度的各个因素的作用, 分别对相机的焦距、内方位元素、相机畸变作为附加参数进行了自检校光束法平差, 结果如表3所示。

通过将相机焦距作为附加参数进行自标定区域网平差后可以发现, 检查点的平面和高程精度均有所提高, 特别是高程精度提高十分明显, 说明焦距对于高程定位精度有较大的影响, 同时说明飞行前十分有必要对相机焦距进行高精度检校。
2.3 相机内参数自检校实验
为进一步分析影响定位精度的因素, 将相机的内方位元素(f, x0, y0)作为附加参数进行区域网平差, 结果如表4。

可以看出, 表4与表1相比, 检查点的平面精度和高程精度均有十分明显的提高, 说明进行内方位元素的自检校十分必要; 与表3相比, 平面精度与高程精度有略微提高, 说明相机内方位元素中, 焦距对于定位精度的影响最大。
2.4 相机内方位元素、镜头畸变自检校光束法平差实验
针对实际飞行前相机没有进行检校标定工作, 本次尝试在区域网平差时同时解算相机的畸变参数, 即将相机畸变参数作为附加参数进行区域网平差。所采用的包括径向畸变K1,K2, K3; 偏心畸变P1, P2; 像平面畸变取b1和b2; 像主点偏差( x0, y0)和相机焦距f的10参数相机模型[6,7]。结果见表5。

对相机畸变参数进行自检校后发现, 平面与高程的定位精度不但没有提高, 反而出现了下降, 特别是高程方向。分析原因, 在于平差时引入了过多的未知数, 引起法方程的不稳定, 过参数化导致解算精度下降。
实验结果表明, 在无人机低空数字摄影测量中, 不事先进行相机检校, 在平差过程中进行自标定补偿相机畸变的方式是不可取的。而事先对相机畸变进行标定, 在区域网平差之前予以改正, 可以获得比较理想的精度。
本研究将相机内参数自检校实验的平差结果作为最终结果, 进行影像密集匹配获取了测区的数字表面模型(digital surface model, DSM), 如图5所示。
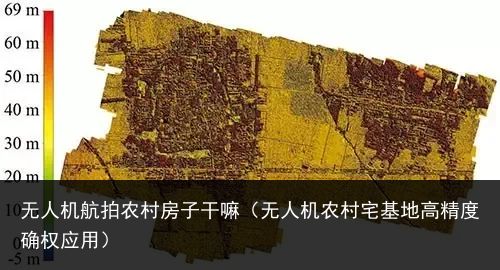
图5 数字表面模型

图6 真正射影像
3 结论
利用轻便小型固定翼无人机获取的影像数据进行农村土地确权是可行的, 速度快、成本低、优势明显。通过对试验结果的分析, 可以得出以下结论:
1)在少量控制点的辅助下, 无人机影像定位精度能够满足1∶ 500成图平面精度要求, 即符合农村宅基地确权的精度要求。
2)内方位元素中, 焦距对定位精度的影响最大, 特别是在高程方向, 其影响更为明显。
3)飞行前应该进行相机检校工作, 在区域网平差之前将相机畸变进行改正, 有利于提高定位精度。
4)相机检校与区域网平差分开进行的方式比较适合于无人机低空摄影测量; 利用附加参数的自检校区域网平差进行相机标定容易因过度参数化导致结果精度恶化, 要慎重使用。
5)在小区域中大比例尺测图中, 可以通过增大影像基高比、增加影像旁向重叠度和选择合适相机的方式提高定位精度。


