

摄像无人机价格(基于室内多摄像机的无人机三维跟踪控制平台)
引用文章:Heng Deng, Qiang Fu, Quan Quan, Kun Yang, and Kai-Yuan Cai. Indoor Multi-Camera Based Testbed for 3D Tracking and Control of UAVs[J]. IEEE Transactions on Instrumentation and Measurement, 2019, doi:10.1109/TIM.2019.2928615.
本文基于室内地面多摄像机,设计开发了一种用于无人机三维跟踪与控制的测试平台。该平台提供了一个全面而完整的设计方案,具有良好的可扩展性,适用于各种高级制导,导航和控制算法的研究,在科学研究,教育,机器人技术等许多领域具有广泛的潜在应用。在未来的研究中,需要研究这种多相机系统中的相机布局问题,以扩大感测范围并减少重建误差。将通过使用更多的摄像机来跟踪和控制更多的无人机来设计大规模的视觉传感网络。
00
本文导读
研究背景
平台软件设计
平台硬件设计
平台实验结果
01
研究背景
基于视觉的无人机三维跟踪与控制平台的研究一直以来受到重视,很多科研人员设计开发自己的三维室内跟踪定位平台,用来验证评估自己更加智能高效的导航、制导与控制算法。因为室内环境可控,实验布局方便,可以重复进行实验,所以基于室内多摄像机系统的无人机测试平台的开发设计一直在被国内外科研人员不断完善研究。然而,现有平台通常缺乏通用,完整的解决方案,无法指导人们进行软件和硬件设计。因此,本文基于室内地面多摄像机,设计开发了一种用于无人机三维跟踪与控制的测试平台。如图 1所示,该测试平台由多摄像机系统和地面控制系统两大部分组成,用来实现图像处理、摄像机标定、三维重建、位姿估计和运动控制等功能。在多摄像机系统中,无人机的位置和方向首先通过极线几何约束和三角测量方法进行三维重建,然后通过扩展卡尔曼滤波器(EKF)进行滤波。在地面控制系统中,利用经典的比例微分(PD)控制器,从多摄像机系统接收导航数据,然后生成对目标无人机的控制指令。

图 1. 室内无人机三维跟踪控制平台结构示意图
02
平台软件设计
在软件设计上,主要包括多摄像机系统和地面控制系统的算法设计以及平台的软件组成结构。多摄像机系统算法设计主要包括图像处理、摄像机标定、位姿估计。

图 2. 导航端软件界面
图像处理主要是对反光小球图像进行阈值处理,提取并匹配点特征。利用红外反光的小球,可以增加图像处理部分的快速性和鲁棒性,简化运算。摄像机标定算法利用一种通用的摄像机球面模型,可以同时适用于普通针孔摄像机、大广角和鱼眼摄像机。利用1D移动靶标和2D三角板,操作方便,受遮挡影响小。位姿估计主要利用扩展卡尔曼滤波器进行状态估计。以无人机的3D位置、3D速度、3D欧拉角和3D角速度构成12维状态变量,滤波器的运动模型假设为匀速运动模型,反光小球的3D空间点与图像上的对应2D投影点作为滤波器的观测模型。借助于图像特征点和上一时刻的位姿估计量,可以预测下一时刻该图像特征点的位置,可以加速特征点提取。地面控制系统主要是根据线性化的无人机模型,进行多通道PD控制器的设计,包括控制俯仰滚转的水平通道PD控制器,控制垂直速度的高度通道PD控制器和控制航向的偏航通道PD控制器。

图 3. 用于摄像机标定的1D移动靶标和2D三角板

图 4. 位姿估计流程示意图

图 5. 地面控制系统中的闭环控制图
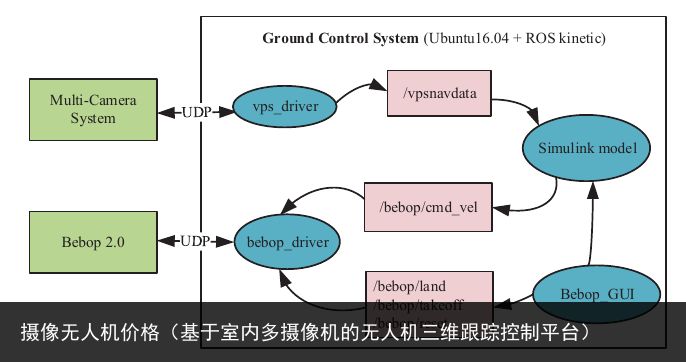
图 6. 平台软件组成结构
平台的软件组成主要是四个ROS结点:Simulink模型结点、bebop_driver结点、vps_driver结点和Bebop_GUI结点。vps_driver结点通过UDP协议与多摄像机系统通信,接收位置、姿态、速度等导航数据,并把数据打包成ROS消息vps_driver/vps_navdata,发布到话题/vpsnavdata。Bebop_driver结点通过UDP协议与Bebop 2.0无人机通信,发送无人机速度控制指令。Simulink模型结点用于接收多摄像机系统的导航数据,运行多通道PD控制器,生成控制指令给无人机。Bebop_GUI是一个简易的控制界面,主要是实现对Bebop无人机的起飞、降落、急停功能。

图 7. Simulink模型

图 8. Bebop GUI节点
03
平台硬件设计
在硬件设计上,主要包括摄像机、传感单元、处理单元、接口单元和应用单元。在测试平台中,智能摄像机被用作主要传感器以获得视觉信息。相机传感器采用互补金属氧化物半导体(CMOS)技术实现,可提供智能相机内部处理流水线的原始图像数据。传感单元读取原始图像数据并执行一些预处理,例如白平衡和颜色转换。它还控制相机的某些参数,例如捕获率,增益或曝光时间。主要的图像处理任务(即特征点检测和提取)在处理单元上执行,该处理单元从传感单元接收图像,执行实时图像处理,最后将所有标记的坐标传输到界面单元。主处理器使用最新的Zynq-7000 SoC,该处理器配备了双核ARM Cortex-A9处理器,该处理器在FPGA上集成了基于28 nm Xilinx的可编程逻辑,从而实现了硬件加速和出色的性能。它具有1GB DDR3和4GB闪存,最大频率高达866 MHz。接口单元提供多个外部输入/输出接口,例如USB和以太网。最后,处理后的数据通过接口单元传输到应用程序单元。该测试平台的主要算法包括多摄像机标定,视觉跟踪和3D控制在应用单元中实现。
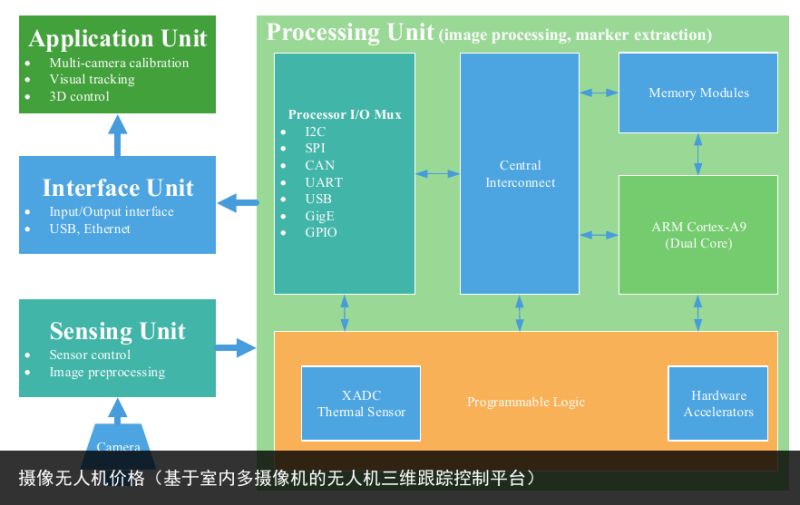
图 9. 平台的硬件组成结构

图 10. 测试平台使用的摄像机
04
平台实验结果
我们利用8台智能摄像机系统对视场范围内的无人机进行三维跟踪与控制实现。实验布置如图 11所示。

图 11. 室内无人机测试平台
首先我们利用商用OptiTrack动作捕捉系统输出的结果作为标准值,对本平台的多摄像机系统进行定位精度测试,结果见图 12,可以发现本平台的多摄像机系统的定位精度高。

图 12. 本测试平台与商用OptiTrack动作捕捉系统的定位精度对比图
接着,我们做了大量的真实飞行实验,包括:
关闭观看更多更多正在加载正在加载退出全屏视频加载失败,请刷新页面再试
刷新 视频详情 视频 1. 单机绕8 关闭观看更多更多正在加载正在加载退出全屏视频加载失败,请刷新页面再试
刷新 视频详情 视频 2. 三机绕圆 关闭观看更多更多正在加载正在加载退出全屏视频加载失败,请刷新页面再试
刷新 视频详情 视频 3. 双机防碰撞结果表明,我们设计开发的基于多摄像机的平台能够有效地对多无人机进行三维跟踪与控制,执行特定地轨迹,而且可以方便地测试路径规划、防碰撞等算法。

点击阅读原文
下载相关论文




