

无人机航测像控点(解答:无人机航测时,如何设置相机参数和外业控制点?)
相信很多拥有无人机飞手,不再只关注怎样拍出好看的照片和视频,怎样让无人机应用在更专业的航空测绘、农业植保、电力巡检等方面,才是他们考虑的问题。
近年来,无人机航测作为航空摄影测量手段的有力补充,因为机动灵活、高效快速、精细准确、作业成本低、适用范围广等特点,在小区域和飞行困难地区高分辨率影响快速获取方面有很大的优势,这也使得无人机航测在地信测绘的应用越来越火。
但关于无人机航测作业过程中,相机参数该如何设置?外业控制点怎么布设呢?

1、航高
行高根据项目要求和测区地形和建筑物的高度决定;飞行高度越低分辨率越高。注意:飞行高度至少也要比被测物体高60米。
像片比例尺定义为像片上的线段与地面上相应水平线段之比:1/m = f/H
H为相对测区平均水平面的高度,f为相机中心到像平面的距离垂距即焦距。
航测比例尺的选定取决于测图比例尺,大体与测图比例尺相当。选定了相机和比例尺以后,可根据公式(1)计算航高。在飞行时,飞机应按照预定的航高飞行,同一航线内各摄站的航高差不得大于40m。
2、像片重叠度
在传统摄影测量学中,航向重叠度一般规定为60%,最小不得小于43%,最大不大于74%;旁向重叠度一般规定为30%,最小不得小于14%,最大不大于40%。无人机进行航测时,根据项目需求不同,可分为以下三种。

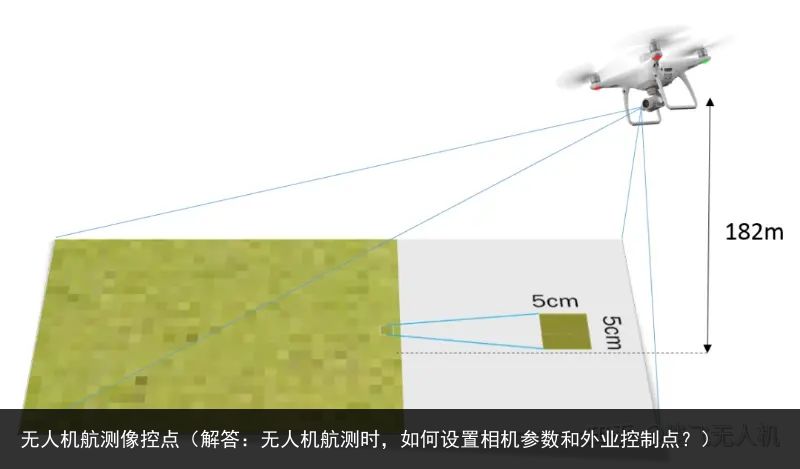
3、飞行高度
客户 A 需要 GSD 为 5cm/pixel 的数据,那 GSD 是什么呢?
GSD 为地面影像分辨率,是指图像中相邻两个像素中心的距离代表实际距离是多少,飞行高度决定了地面影像分辨率(GSD)。飞行高度与地面影像分辨率成反比,飞行越高地面影像分辨率越低。
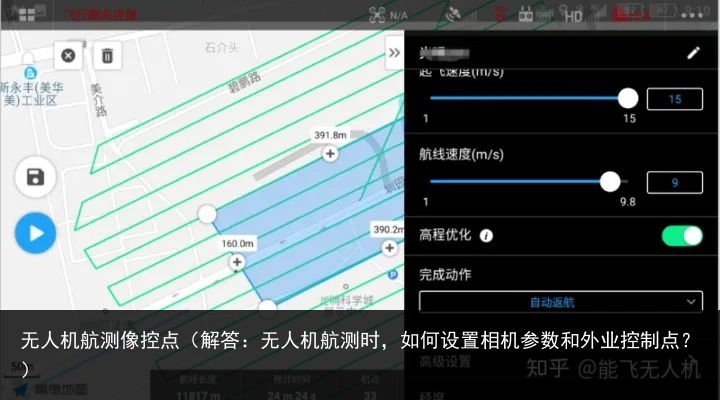
4、飞行速度设计
当飞机的飞行速度过快时,飞机的倾斜角度会随之增大,倾斜影像的倾斜角度不宜过大,否则会影响内业数据处理,因此在设置飞行速度时要结合项目进度和实际情况,合理设置飞行速度。最佳飞行速度请参考如下表格:
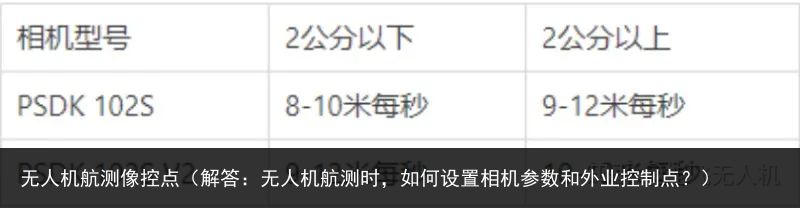
5、快门速度
相机搭载大疆的无人机可以在地面站软件上调节快门速度,建议快门速度如下表所示:

注意:不要在飞行期间更改快门设置,可能造成不同视角快门速度不一致的现象。快门是机械结构组件,当使用一定次数后,快门的整体性能会随着使用次数降低;赛尔 PSDK 102S 快门达到8万次后建议航飞速度要小于11m/s ,15万次后建议航飞速度小于10m/s,20万次建议航飞速度小于9m/s,超过20w次建议航飞速度改为8m/s。快门次数大于20万次建议更换快门。
6、外扩
倾斜摄影作业外扩至少一个航高;正射作业外扩至少50%的航高,要打开高程优化。
7、等距拍照和等时拍照
建议使用等距拍照,等距拍照的效果要优于等时拍照。
8、如何在地面上调节相机参数
点击遥控器屏幕右上角三个点,选择负载Payload设置,此界面有以下功能:
以上是无人航测是设置参数的具体内容,想成为职业飞手,加入无人机测绘行业?考取驾驶证是首要。想知道无人机驾驶证如何考取?可咨询了解,免费提供课程资料及专业解答。



