

无人机激光通信终端(基于可见光波段无人机遥感的植被信息提取)
基于可见光波段无人机遥感的植被信息提取
作者:汪小钦,王苗苗,王绍强,吴云东
摘要:无人机遥感具有使用成本低、操作简单、获取影像速度快、地面分辨率高等传统遥感无法比拟的优势。该文通过分析仅含红光、绿光和蓝光3个可见光波段的无人机影像中植被与非植被的光谱特性,同时结合健康绿色植被的光谱特征,借鉴归一化植被指数NDVI的构造原理及形式,提出了一种综合利用红、绿、蓝3个可见光波段的归一化植被指数——可见光波段差异植被指数VDVI(visible-band difference vegetation index)。与其他基于可见光波段的植被指数,如过绿指数EXG(excess green)、归一化绿红差值指数NGRDI(normalized green-red difference index)、归一化绿蓝差值指数NGBDI(normalized green-blue difference index)和红绿比值指数RGRI(red-green ratio index)以及仅用绿光波段的提取结果进行对比分析,结果表明:VDVI植被提取精度高于其他可见光波段植被指数,且阈值在0附近,较易确定。为了验证VDVI的适用性与可靠性,选取与试验影像同一时期拍摄但不同区域的另一影像使用同样的方法提取植被信息。结果表明:VDVI对于仅含可见光波段无人机遥感影像的健康绿色植被信息具有较好的提取效果,提取精度可达90%以上,适用于仅含可见光波段无人机遥感影像的健康绿色植被信息提取。
关键词:无人机;植被;提取;可见光波段;可见光波段差异植被指数VDVI
引 言
无人机(unmanned aerial vehicle,UAV)是指通过无线遥控与规划航线飞行的无人驾驶飞机[1]。其与遥感技术的结合,即无人机遥感。无人机遥感是综合利用先进的无人驾驶飞行技术、遥感遥控技术及遥感应用等技术,快速获取国土资源与环境等空间遥感信息的应用技术[2]。无人机遥感属于低空遥感技术,其在获取影像过程中不受大气因素的干扰,具有使用成本低、操作简单、获取影像速度快、地面分辨率高等[3]传统遥感技术所无法比拟的优势。无人机遥感技术的这些优点使其在小区域遥感应用方面有着广阔的应用前景。目前对无人机遥感的研究主要集中在对飞行系统的研制[4-6]、遥感影像处理方法[7-10]、森林资源清查与农作物监测等[11-15]方面。如Mitch Bryson等[16]使用可见光低空拍摄无人机影像基于植被颜色及纹理对不同植被类型进行分类;Torres-Sánchez等[12]将高分辨率无人机影像应用于精准农业;Francisco等[17]使用无人机影像对植被黄龙病进行监测等。目前,无人机遥感技术在遥感领域中正发挥着越来越重要的作用,必将成为未来航空遥感不可或缺的手段之一[18]。
植被是陆地生态系统最重要的组成部分,在维护生态系统平衡、涵养水源、保持水土等方面具有重大作用。利用遥感技术开展植被相关信息监测是遥感的主要应用,植被指数是植被遥感监测中最被广泛应用的参数之一。植被指数是对地表植被状况的简单、有效和经验的度量[19],它可以有效地反映植被活力与植被信息,成为遥感反演植被叶绿素含量、植被覆盖度、叶面积指数、生物量、净初级生产力和光合有效辐射吸收等生物物理与生物化学参数的重要技术手段[20]。迄今为止,国内外提出的植被指数有上百种,但大多指数都包含可见光-近红外波段。而目前国内外无人机的实际应用中,考虑到传感器获取的难易性及成本等原因,对仅含可见光波段无人机影像获取更为普遍,使用也更为广泛。因此非常有必要设计一种适用于仅含可见光波段植被指数用于无人机遥感影像的植被信息提取。
本文针对仅含可见光波段的无人机影像,开展植被信息提取方法研究,以期获得一种能够快速有效提取植被信息的方法,扩大无人机遥感的应用范围,促进无人机遥感的定量应用。
1 材料与方法
1.1 可见光无人机影像获取
本文采用2013年所拍摄的福建省长汀县河田镇无人机遥感影像数据为例进行实验,研究区位于116°16′~116°30′E,25°35′~25°46′N。影像拍摄时间为2013年8月中上旬,拍摄高度约1 000 m,属于低空拍摄,拍摄时天气状况良好,无风无云。所获取的影像不受大气因素的影响,与实际的情况一致,由于本研究中对各波段中心波长的位置和波段范围并没有严格要求,所获取的影像没有进行严格的辐射定标。研究影像具有红、绿、蓝3个波段,空间分辨率为0.1 m。由于影像的超高空间分辨率的特点,整个区域的影像数据量巨大,为了便于说明,本文选取影像中包含地物类别丰富且较具代表性的一景影像(编号DSC04918)开展方法研究(图1),影像中包含3264像元×4913像元,面积约160360 m2。
 图1 研究区域无人机影像(DSC04918)
图1 研究区域无人机影像(DSC04918) 1.2 可见光无人机数据植被指数构建
1.2.1 可见光波段植被指数
健康绿色植被在绿光和近红外波段有较强反射作用,而在蓝光和红光波段吸收作用,典型健康绿色植被的光谱曲线如图2所示。植被指数就是利用绿色植被在不同波段的反射和吸收特性,对传感器不同波段进行组合运算,增强植被的信息。它本质上是综合考虑各有关光谱信号,把多波段反射率做一定的数学变换,使其在增强植被信息的同时,使非植被信息最小化[21]。
 图2 健康绿色植被光谱曲线
图2 健康绿色植被光谱曲线目前遥感领域中提出的植被指数有100多种[22],但大多数都基于可见光-近红外波段,如较为常见的归一化植被指数NDVI(normalized difference vegetation index)、比值植被指数RVI(ratio vegetation index)及增强型植被指数EVI(enhanced vegetation index)等。对于仅基于可见光波段的植被指数较少,主要有过绿指数EXG(excess green)[12,23]、归一化绿红差异指数NGRDI(normalized green-red difference index)[20,24]、仿照NGRDI构造的归一化绿蓝差异指数NGBDI(normalized green-blue difference index)及红绿比值指数RGRI(red-green ratio index)[25],计算方式如式(1)~(4)所示:
 式中:ρred、ρgreen、ρblue分别表示红、绿、蓝3个波段的反射率或像元值
式中:ρred、ρgreen、ρblue分别表示红、绿、蓝3个波段的反射率或像元值1.2.2 可见光波段差异植被指数VDVI的构建
为了提取影像的植被信息,首先分析无人机影像上绿色植被与非植被的光谱特性,通过观察它们在各波段间反射率的差异,构造植被指数,提取植被信息。
通过对图1所示研究区影像的观察,确定在无人机影像上选取的绿色植被信息包括树木、灌木、草地及农田(非绿色植被信息提取不在本研究范围内);非植被信息包括裸土、水泥路及建筑物。为了使典型地物光谱信息的统计更具代表性,对于每种地物分别选取20个代表区域,统计各典型地物在红、绿、蓝3个波段中像元的统计特征值(包括最大值、最小值、平均值及标准偏差等)。选取平均值分析各地物在3个波段的像元值总体差异,并引入标准差作为每个波段像元值的波动范围,统计结果如表1所示。
 表1 典型地物在蓝、绿、红波段的像元值差异表
表1 典型地物在蓝、绿、红波段的像元值差异表从表1中可以看出:1)植被(包括树木、灌丛、草地、农田)的像元值满足ρgreen>ρred>ρblue,即绿光波段反射率最大,其次是红光波段,蓝光波段反射率最小,这与图2中健康绿色植被的光谱曲线相吻合;2)非植被地物满足ρred>ρgreen>ρblue(裸土与水泥路)与ρblue>ρgreen>ρred(建筑物);3)植被与非植被的数值范围在红光和蓝光波段基本没有重叠现象,只有裸土在绿光波段与植被区有重合,这说明在绿光波段裸土易与植被混淆,而在红光与蓝光波段较易将它们区分。因此,仅利用绿光与红光波段,或者仅用绿光与蓝光波段构造的植被指数,不易将植被与某些非植被区分开。
目前国内外使用最多且提取植被效果较好的植被指数NDVI是利用植被对近红外光强反射及对红光强烈吸收的特点所构造的,对于不包含近红外波段的可见光影像,由于绿光波段具有较强的反射特性,红光和蓝光具有吸收特性,通过综合考虑健康绿色植被的光谱特性(图2)及无人机影像典型地物光谱特征值(表1),并借鉴NDVI的构造原理及形式,以绿光波段代替NDVI中的近红外波段,以(ρred+ρblue)代替NDVI中的红光波段,并将绿光波段乘以2使其在数值上与(ρred+ρblue)相当。由此构建基于可见光3个波段的植被指数VDVI(visible-band difference vegetation index),即可见光波段差异植被指数。具体如公式(5)所示:
 式中:VDVI的数值范围为[-1,1]
式中:VDVI的数值范围为[-1,1]1.3 基于阈值的植被信息提取
无人机影像中的植被提取主要分2个步骤:首先计算植被指数,然后设定合适的阈值,将植被指数大于阈值的像素归为植被,小于阈值的像素归为非植被。阈值的确定是利用植被指数提取植被信息的关键[4],阈值选取的好坏将直接影响植被的提取精度。本文利用双峰直方图法与直方图熵阈值法分别确定各植被指数的阈值,并比较两种方法得到阈值的提取精度,将提取精度高的阈值确定为最终阈值。
1.3.1 双峰直方图阈值确定法
双峰直方图通常是指图像中含有2个明显坡峰的直方图,这2个峰分别对应于对象内部与外部较多数目的点。两峰之间的坡谷对应于对象边缘附近相对较少数目的点[26],即坡谷一般就是阈值的选取处。
1.3.2 直方图熵阈值法
该方法首先假设阈值为t,则阈值t将图像分为目标O与背景B两大类。目标区域的熵为HO(t),背景区域的熵为HB(t),则使总熵H(t)= HO(t)+ HB(t)取得最大值时所对应的t值即为最佳阈值[27]。
2 结果与分析
2.1 植被指数计算与分析
利用式(1)~式(5)分别计算各植被指数,得到植被指数空间分布如图3所示。
 图3 各植被指数计算结果图
图3 各植被指数计算结果图其中,除RGRI外的其余植被指数分布图均是色调越亮表示植被指数值越大,越暗表示植被指数值越小。由于植被在绿光波段具有强反射,理论上利用绿光波段也可提取植被信息。故本次研究也尝试仅利用影像绿光波段提取植被,绿光波段的灰度图如图3f所示。从图3中可以看出VDVI、EXG及NGBDI指数的植被与非植被区灰度值差异较为明显,植被区域呈现亮白色调,非植被区域比较暗;而NGRDI与RGRI指数中的水泥路与草地及灌木的灰度值很接近,植被易与某些非植被混淆;绿光波段的灰度图中水泥地具有高反射,植被和裸土的灰度值比较接近,仅依靠单一的绿光波段,很容易造成误提漏提现象。
上述植被指数中,NGRDI、NGBDI和VDVI值的范围都在[-1,1]间,EXG的值区域范围比较大,理论上为[-255,255]。为了更好地比较这几种植被指数,从计算得到的植被指数中利用与选取典型地物相同的AOI区域,统计它们在各植被指数中统计特征值(表2)。
 表2 VDVI、NGRDI、NGBDI和 EXG的统计特征值
表2 VDVI、NGRDI、NGBDI和 EXG的统计特征值从表2可以看出,NGRDI除裸土外,其余典型地物的数值范围都相互交叉,可知NGRDI并不适用于无人机植被信息的提取;NGBDI与VDVI典型植被与非植被地物的指数值无交叉现象,表明NGBDI与VDVI都较适合于无人机植被信息的提取,且VDVI植被与非植被指数值较为紧凑,阈值基本在0值附近,更有利于阈值的确定。EXG指数中植被区的指数值都大于20,而非植被区的除部分建筑物小于20外,其余均小于20,故阈值分布应在20左右。但建筑物与农田存在一定的交叉现象,会造成部分误提现象。
2.2 植被区域提取与精度评价
各植被指数及绿光波段对应的灰度直方图如图4所示,图中横坐标为各植被指数(或波段)的值,纵坐标为像元个数。除EXG及绿光波段外,其他指数的直方图都具有较明显的双峰特征。
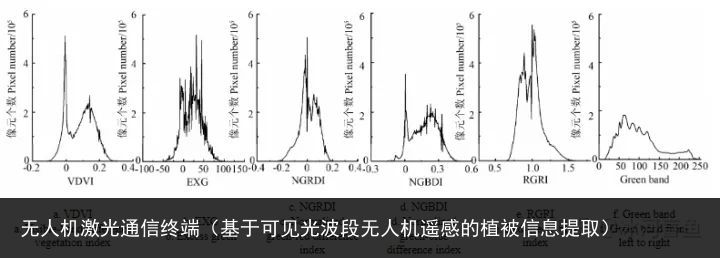 图4 各植被指数统计直方图
图4 各植被指数统计直方图利用双峰直方图阈值法和直方图熵阈值法确定各植被指数的阈值(表3)。利用表3中2种方法所确定的阈值提取植被信息,得到各植被指数对应的植被分布结果。并采用人机交互的方式,将影像逐像元分成植被与非植被区,分类结果如图5a所示,以此作为参考影像评价各植被指数提取植被的精度,得到各植被指数提取的植被区域的精度评价如表4所示。表4显示无论用双峰阈值法还是直方图熵阈值法,VDVI提取植被的总体精度都是最高的,且用双峰阈值法确定的阈值提取精度要比直方图熵阈值法高。
 表3 各植被指数及绿光波段阈值
表3 各植被指数及绿光波段阈值由表4可知,EXG的统计直方图不属于双峰直方图,无法用双峰直方图法确定阈值,其用直方图熵阈值法确定的阈值能够提取出大部分的植被信息;NGRDI无论用哪种方法确定阈值提取植被的效果都不好,仅能提取出高植被覆盖区,对于草地等稀疏的植被提取效果不佳;NGBDI用直方图熵阈值法的提取精度高于双峰阈值法,但其提取总体精度仍低于VDVI;RGRI提取效果较差;仅用绿光波段的提取结果中,裸土与植被信息易混淆,虽能提取出大部分的植被信息,但裸土误提为植被现象严重,植被信息提取精度较不高。
 表4 植被提取精度评价表
表4 植被提取精度评价表根据表4的精度评价,采用双峰阈值法确定VDVI与NGRDI的阈值,其余植被指数和绿光波段阈值采用直方图熵阈值法确定。利用上述选定的阈值得到的各植被信息提取结果如图5b~5g所示。
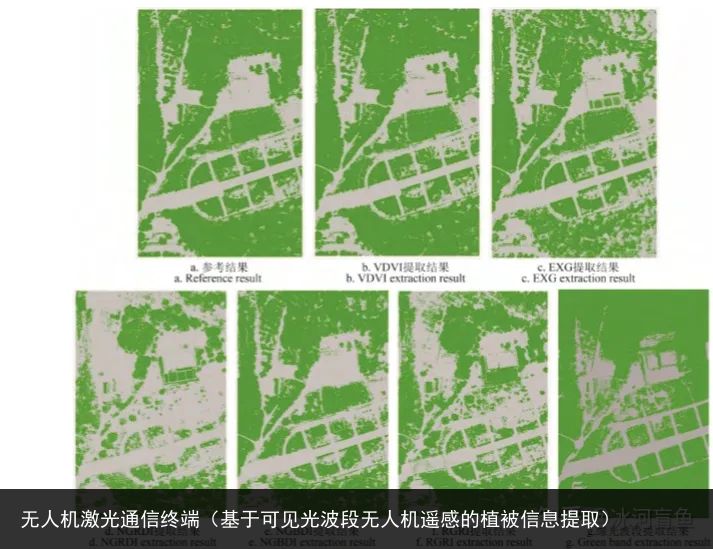 图5 基于不同植被的提取结果
图5 基于不同植被的提取结果注:图中绿色为植被区,灰色为非植被区。
从图5中可以看出,基于VDVI的提取结果与参考结果最为接近。
2.3 方法验证
上述研究结果表明,相对于其余可见光波段的植被指数,VDVI的提取精度最高。为了验证VDVI指数的适用性与可靠性,本文选取与试验影像同一时间段拍摄的福建省上杭县才溪镇中含地物类型较为丰富编号为DSC00381(图6a)的影像,用同样的方法提取植被信息。DSC00381影像计算的VDVI结果及植被提取结果如图6b~6c所示。
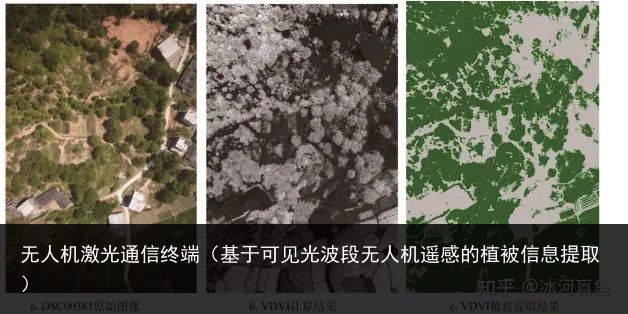 图6 VDVI验证结果
图6 VDVI验证结果注:图c中绿色为植被区,灰色为非植被区。
为了评价基于VDVI的植被提取精度,在影像中随机生成200个点,利用在高分辨率影像中植被和非植被信息很容易目视识别的特点,开展植被信息提取结果的精度评价。基于误差矩阵表获得生产者精度和用户精度(表5),并计算总精度和Kappa系数。
 表5 DSC00381植被提取误差矩阵表
表5 DSC00381植被提取误差矩阵表根据表5的精度评价,DSC00381影像中植被总体提取精度达到91.50%,Kappa系数为0.8256,提取精度较高。基于以上的试验及验证结果,认为VDVI能够适用于无人机可见光波段植被信息的提取,阈值容易确定,提取精度高。
3 结 论
本文针对可见光无人机影像的光谱特征,构造了一种综合利用可见光红、绿、蓝3个波段的新型植被指数VDVI,研究结果表明:
1)VDVI综合利用了植被在绿光波段的反射及在红光和蓝光波段的吸收特性,其形式与NDVI相似,数值范围在[-1,1],能较好地区分植被与非植被。
2)VDVI植被与非植被阈值确定比较简单,在0值附近。基于VDVI的植被提取结果精度高于其他可见光波段植被指数和绿光波段的提取结果,总体精度可达90%以上。表明VDVI在仅有可见光波段的无人机影像植被信息的提取中将可发挥较好的作用,具有较好的适用性。
无人机遥感所获取的影像分辨率是传统卫星及航空遥感所无法比拟的,它所获取的超高分辨率的影像可以代替人为的野外实测调查,在小区域精细遥感应用中有广阔的应用前景,必将成为未来航空遥感不可或缺的手段之一。基于无人机影像的植被遥感将是重要的应用之一,在本文已有的研究基础上,将进一步验证VDVI对不用传感器的适用性、开展自适应阈值确定和VDVI不同植被类型识别方法的研究等,促进无人机植被遥感的进一步发展。
[参 考 文 献]
[1]邹湘伏,何清华,贺继林. 无人机发展现状及相关技术[J]. 飞航导弹,2006(10):9-14. Zou Xiangfu, He Qinghua, He Jilin. The current development situation of UAV and related technology[J]. Aerodynamic Missile Journal, 2006(10): 9-14.(in Chinese with English abstract)
[2]田振坤,傅莺莺,刘素红,等. 基于无人机低空遥感的农作物快速分类方法[J]. 农业工程学报,2013,29(7):109-116. Tian Zhenkun, Fu Yingying, Liu Suhong, et al. Rapid crops classification based on UAV low-altitude remote sensing[J]. Transactions of the Chinese Society of Agricultural Engineering(Transation of the CSAE), 2013, 29(7): 109-116.(in Chinese with English abstract)
[3]王利民,刘佳,杨玲波,等. 基于无人机影像的农情遥感监测应用[J]. 农业工程学报,2013,29(18):136-145. Wang Limin, Liu Jia, Yang Lingbo, et al. Applications of unmanned aerial vehicle images on agricultural remote sensing monitoring[J]. Transactions of the Chinese Society of Agricultural Engineering (Transation of the CSAE), 2013, 29(18): 136-145.(in Chinese with English abstract)
[4]鲁恒,李永树,何敬,等. 无人机低空遥感影像数据的获取与处理[J]. 测绘工程,2011,20(1):51-54. Lu Heng, Li Yongshu, He Jing, et al. Capture and processing of low altitude remote sensing images by UAV[J]. Engineering of Surveying and Mapping, 2011, 20(1): 51-54.(in Chinese with English abstract)
[5]崔红霞,林宗坚,孙杰. 无人机遥感监测系统研究[J]. 测绘通报,2005(5):11-14. Cui Hongxia, Lin Zongjian, Sun Jie. Monitoring system research of UAV remote sensing[J]. Bulletin of Surveying and Mapping, 2005(5): 11-14.(in Chinese with English abstract)
[6]洪宇,龚建华,胡社荣,等. 无人机遥感影像获取及后续处理探讨[J]. 遥感技术与应用,2008,23(4):462-466. Hong Yu, Gong Jianhua, Hu Sherong, et al. Discussion on UAV remote sensing image capture and disposal[J]. Remote Sensing Technology and Application, 2008, 23(4):462-466.(in Chinese with English abstract)
[7]Hakala Teemu, Suomalainen Juha, Peltoniemi Jouni I:Acquisition of bidirectional reflectance factor dataset using a micro unmanned aerial vehicle and a consumer camera[J]. Remote Sensing, 2010, 2(3): 819-832.
[8]周晓敏,赵力彬,张新利. 低空无人机影像处理技术及方法探讨[J]. 测绘与空间地理信息,2012,35(2):182-184. Zhou Xiaomin, Zhao Libin, Zhang Xinli. Discussion on technique and method of low level UAV image processing[J].Geomatics & Spatial Information Technology, 2012, 35(2): 182-184.(in Chinese with English abstract)
[9]潘舒放. 基于IDL的无人机遥感影像拼接研究与实现[D]. 北京:中国地质大学,2009. Pan Shufang. The UVA Remote Sensing Image Mosaic Research and Implements Based on IDL[D]. Beijing: China University of Geosciences(Beijing), 2009.(in Chinese with English abstract)
[10]陈佳祥,桂丹萍. 基于加权Fisher模糊判别准则的真彩色影像分类方法研究[J]. 集美大学学报:自然科学版,2011,16(3):236-240. Chen Jiaxiang, Gui Danping. True color image classification model based on weighted fisher fuzzy criterion[J]. Journal of Jimei University: Nature Science, 2011, 16(3): 236-240.(in Chinese with English abstract)
[11]Bellvert J, Zarco-Tejada P J, Girona J, et al. Mapping crop water stress index in a ‘Pinot-noir’ vineyard: Comparing ground measurements with thermal remote sensing imagery from an unmanned aerial vehicle[J]. Precision Agriculture, 2014, 15(4): 361-376.
[12]Torres-Sánchez J, Peña J M, de Castro A I, et al. Multi-temporal mapping of the vegetation fraction in early-season wheat fields using images from UAV[J]. Computers and Electronics in Agriculture, 2014, 103: 104-113.
[13]Reid Alistair, Ramos Fabio, Sukkarieh Salah. Multi-class classification of vegetation in natural environments using an Unmanned Aerial system[C]. IEEE International Conference on Robotics and Automation (ICRA), 2011: 2953-2959.
[14]Berni J, Zarco-Tejada P J, Suarez L, et al. Thermal and narrowband multispectral remote sensing for vegetation monitoring from an unmanned aerial vehicle[J]. IEEE Transactions on Geoscience and Remote Sensing, 2009,47(3): 722-738.
[15]Müller Karla, Böttcher Ulf, Meyer-Schatz Franziska, et al. Analysis of vegetation indices derived from hyperspectral reflection measurements for estimating crop canopy parameters of oilseed rape (Brassica napus L.)[J]. Biosystems Engineering, 2008, 101(2): 172-182.
[16]Bryson Mitch, Reid Alistair, Ramos Fabio, et al. Airborne vision-based mapping and classification of large farmland environments[J]. Journal of Field Robotics, 2010, 27(5): 632-655.
[17]Garcia-Ruiz Francisco, Sankaran Sindhuja, Maja Joe Mari, et al. Comparison of two aerial imaging platforms for identification of Huanglongbing-infected citrus trees[J]. Computers and Electronics in Agriculture, 2013, 91: 106-115.
[18]李冰,刘镕源,刘素红,等. 基于低空无人机遥感的冬小麦覆盖度变化监测[J]. 农业工程学报,2012,28(13):160-165. Li Bing, Liu Rongyuan, Liu Suhong, et al. Monitoring vegetation coverage variation of winter wheat by low-altitude UAV remote sensing system[J]. Transactions of the Chinese Society of Agricultural Engineering(Transation of the CSAE) , 2012, 28(13): 160-165. (in Chinese with English abstract)
[19]郭铌. 植被指数及其研究进展[J]. 干旱气象,2003,21(4):71-75.Guo Ni. Vegetation index and its advances[J].Arid Meteorology, 2003, 21(4): 71-75. (in Chinese with English abstract)
[20]江洪,汪小钦,吴波,等. 地形调节植被指数构建及在植被覆盖度遥感监测中的应用[J]. 福州大学学报:自然科学版,2010,38(4):527-532.Jiang Hong, Wang Xiaoqin, Wu Bo, et al. A topography -adjusted vegetation index(TAVI) and its application in vegetation fraction monitoring[J]. Journal of Fuzhou University: Nature Science, 2010, 38(4): 527-532. (in Chinese with English abstract)
[21]罗亚,徐建华,岳文泽,等. 植被指数在城市绿地信息提取中的比较研究[J]. 遥感技术与应用,2006,21(3):212-219. Luo Ya, Xu Jianhua, Yue Wenze, et al. Comparison vegetation index in urban green space information extraction[J]. Remote Sensing Technology and Application, 2006, 21(3): 212-219.(in Chinese with English abstract)
[22]傅银贞,汪小钦. 基于北京一号CCD数据的植被指数特性分析[J]. 测绘科学,2010,35(6):35-38. Fu Yinzhen, Wang Xiaoqin. Analysis of vegetation indices based on the CCD data of BJ-1[J]. Science of Surveying and Mapping, 2010, 35(6): 35-38.(in Chinese with English abstract)
[23]龙满生,何东健. 玉米苗期杂草的计算机识别技术研究[J]. 农业工程学报,2007,23(7):139-143. Long Mansheng, He Dongjian. Weed identification from corn seeding based on computer vision[J]. Transactions of the Chinese Society of Agricultural Engineering( Transation of the CSAE), 2007, 23(7): 139-143.(in Chinese with English abstract)
[24]Meyer George E, Neto Joao Camargo. Verification of color vegetation indices fo automated crop image applicati0n[J]. Computers and Electronics in Agriculture, 2008(63): 282-293.
[25]Verrelst J, Schaepman M E, Koetz B, et al. Angular sensitivity analysis of vegetation indices derived from CHRIS/PROBA data[J]. Remote Sensing of Environment, 2008, 112(5): 2341-2353.
[26]梁华为. 直接从双峰直方图确定二值化阈值[J]. 模式识别与人工智能,2002,15(2):253-256. Liang Huawei. Direct determination of threshold from bimodal histogram[J]. Pattern Recognition and Artificial Intelligence, 2002, 15(2): 253-256.(in Chinese with English abstract)
[27]Kapur J N, Sahoo P K, Wong A K C. A new method for gray-level picture thresholding using the entropy of the histogram[J]. Computer Vision, Graphics, and Image Processing, 1985, 29(3): 273-285.




