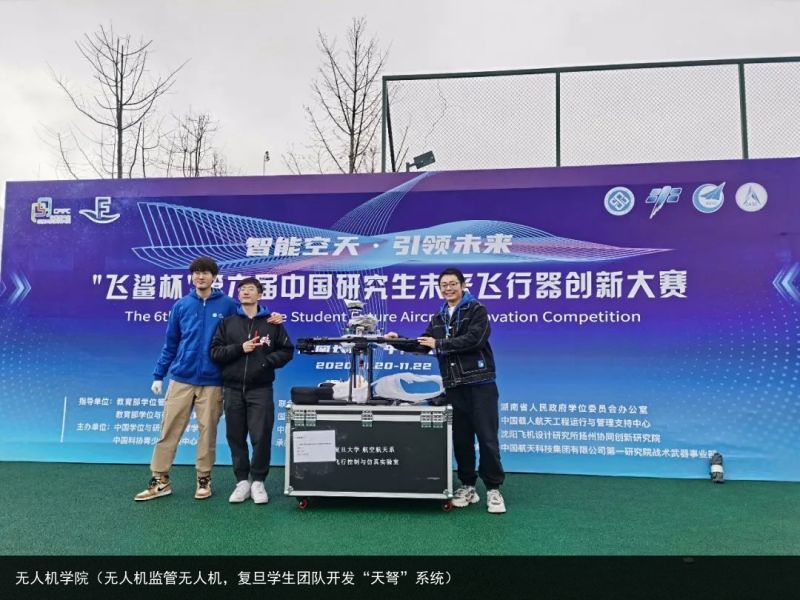
无人机学院(无人机监管无人机,复旦学生团队开发“天弩”系统)
从影像拍摄到活动宣传,从气象监测到灾后搜救……近年来,越来越多的无人机走进人们的日常生活,带来了便利,增添了色彩。然而,一些现象也引起了人们的关注,未获许可而进行飞行的无人机,会对公共秩序造成干扰,带来一定的安全隐患。
如何对这些飞行器进行监管,成为一道难题。“天弩”空中反无人机系统(以下简称“天弩”系统),是复旦大学航空航天系天弩团队为此打造的一支“利箭”。
11月22日,在 “飞鲨杯”第六届中国研究生未来飞行器创新大赛中,团队最新开发的分系统——“helicarrier”多旋翼空中自主对接起降系统,获得全场最佳实物演示奖和常规赛道二等奖。大赛由教育部学位与研究生教育发展中心指导,中国科协青少年科技中心主办,国际宇航联合会、中国航天基金会、中国宇航学会、中国航空学会联合主办。

天弩团队由复旦学子组成,他们的导师是复旦大学科学技术研究院副院长、航空航天系教授、飞行器设计研究所所长艾剑良。在其悉心指导下,团队自2018年10月起开始研发“天弩”系统,目前已成功推出2.0版本。
“系统的理念是用无人机监管无人机。”项目“总师”艾剑良介绍,该系统集自动识别、跟踪、打击功能于一体,具有可超视距、低成本、适用范围广的优势。这将与成本高、管控范围小的传统监管手段形成互补,更加高效地排除安全隐患,维护公共安全。

▲
天弩团队
第一排(从左到右):刘云霄(2020级博),张立(2020级博),艾剑良(教授),王亮(2018级博),龚帮民(2019级硕);第二排(从左到右):李涵(2020级博),邢振林(2018级博)
超视距,低成本,多用途,
“空中卫士”上线
“我们的优势在于可超视距、成本低,用途广。”团队负责人之一、航空航天系2018级博士研究生王亮介绍道。
在他看来,传统无人机监管手段成本高、管控范围有限。无论是追查操控人员的监测溯源,还是使用武器直接摧毁,或者是人工信号干扰枪,应用范围都十分有限,且成本高昂,“比如最为常见的多频段干扰枪,不仅需要人工观瞄,还会带来干扰正常通讯等问题”。此外,倘若遇到超视距、空飘物、雷达无法探测的目标,这三种手段都无法实现有效管控。
而相较于这些传统的监管手段,“天弩”系统使用无人机监管无人机,实现了自动目标识别、跟踪定位、自主打击三位一体。这极大地降低了监管难度与成本。同时,小型无人机随时起降的特性,也有助于适应更加复杂的环境,扩大泛用性。

▲
室内静态打靶测试

▲
室外动态打靶测试

▲
避障测试
“‘天弩’系统1.0版本凸显了低成本和应用范围广的优势。”王亮介绍,该版本无人机已经可以预设路线自主飞行,自主识别跟踪目标,并进行有效打击,可以弥补传统监管手段的不足。
如今,“天弩”系统2.0版本已经诞生。相较于1.0版本,新版加入了多目标识别与跟踪、夜间工作模式、抗干扰等更加先进的功能。不仅如此,新版本的升级还在于初步实现了多平台协同组网。每一台无人机既是任务的执行者,又是信息的传递者。它们不仅可以各自执行好预设的任务模式,也可将图像、态势等信息,通过数据链、中继等形式,进行共享,传递给固定地面站、移动地面站。这意味着仅需少量工作人员,即可对大范围区域有效管控,“这进一步提高了空域监管效率和多任务能力”。
这其中,无人机的续航成为了关键。为了突破多旋翼无人机续航、执行任务范围的限制,团队又提出了“helicarrier”概念。“就好像携带战斗机的航空母舰。” 团队成员、航空航天系2020级博士研究生李涵打了个比方,技术的核心在于大型飞行平台携带多架小型任务无人机,在空中自主起降协同组网。在他看来,这将进一步拓展无人机执行多元化任务的能力,“我们最初的灵感,就是设计可执行多任务的空中无人机监管系统”。
将所学化作实践,
每个人都是主角
这个灵感来自于2018年9月的一堂课上,艾剑良在向同学们介绍了当前无人机、空飘物监管的严峻现实后,提了一个问题:“能否设计一种无人机监管系统,弥补当前手段的不足?”
这启发了团队同学,他们决定运用自己的所学,基于计算机视觉技术,设计一套集自主识别、跟踪、打击于一体的空中反无人机系统。
经过反复周密的验证,2018年10月,“天弩”空中反无人机项目正式启动。
项目的进展并非一帆风顺。团队发现,从理念构想的提出,到系统架构的设计,再到实物样机的制作和调试,处处是细节,都需要推敲。“有压力,夜深人静时经常焦虑。”邢振林坦言。作为航空航天系2018级博士研究生,他主要负责系统架构设计。他介绍,数据链如何设计?算法效率如何提高?精度如何保证?问题一个接一个涌现,团队同学不得不反复修改设计方案,“有时连续几天只在纠结几行代码”。
最大的困难在于从理论到工程实践的转换:2019年5月,历时半年的技术积累后,1.0版本样机制作完成,进入外场测试环节。然而,各类问题在测试初期接踵而至:图传延迟过大、各种天线信号线互相干扰、目标跟踪丢失……
团队不得不频繁往返于测试场与实验室之间。为了满足飞行需要,他们把测试场地从虹口区科技体育中心测试场转到了松江区玄风航空飞行营地。为此,他们需要早晨八点出发,外出测试,晚上八点回到学校,修改程序。“来回路上就需要3个小时。”团队始终保持着一种默契:“我们必须分秒必争!”
“半天一瓶驱蚊花露水。”团队成员、航空航天系2020级博士研究生张立回忆道。野外测试时正值夏季,飞行营地地处偏僻,高温酷暑与蚊虫叮咬成了一道难关。他们不得不用长衣长裤把浑身上下包得严严实实,只露出眼睛和鼻子。“即使如此,晒伤仍然是家常便饭,整片皮肤都火辣辣地疼。”张立笑道,“还有蚂蚁,一不留神就会从衣服里爬进去” 。


▲
正在外场做夜间飞行测试、包裹得严严实实的王亮(2020年9月16日 摄,地点:上海市松江区玄风航空飞行营地)
这群年轻人没有停下来,他们的付出得到了回报。研发期间,在学校相关部门和航空航天系的支持下,他们共申报相关专利30余项。2019年7月,“天弩”系统1.0版本正式亮相第五届“互联网+”全国大学生创新创业大赛,获上海赛区金奖。8月,该系统参加第五届中国研究生未来飞行器创新大赛,斩获全国一等奖。
探索永无止境。2020年7月,“天弩”系统2.0版本测试成功。8月,2.0版本获第十五届中国研究生电子设计竞赛全国一等奖、企业奖专项奖。9月16日,“helicarrier”初具雏形,单架任务无人机在空中平台自主起降成功——团队视之为阶段性的胜利,这为接下来多架任务无人机自主起降奠定了坚实的基础。

▲
左起,王亮、张立(2020年8月21日 摄,地点:南京)
如今,平台无人机最大续航时间已达45分钟,小型任务无人机工程样机也已实现10分钟续航。在未来减重提高集成度后,成熟的“天弩”helicarrier系统有望实现6架无人机顺序自主起降,协同组网。
在航空航天系2019级硕士研究生龚帮民看来,“天弩”系统从理论到实践的跨越,既离不开团队的协作,更离不开团队的严谨作风。与此同时,老师提供关键技术的指导,协调研发资源;系里安排测试资源、沟通项目参赛展示;而团队全体成员负责具体方案的实施推进。
“每个人都是主角。”他认为,在研发过程中,团队不设固定的例会,根据若干时间节点,合理规划测试安排,并配合随时的讨论。因此,自己的知识水平以及团队沟通合作能力都有了很大的提升。“不论是在思维层面,还是实践层面,都见识了许多,更学到了许多。”
铸造空中”利箭“,立志航空报国。“‘天弩’系统的开发持续两年了,挑战是有的,但我们不会停下来。”回顾团队的研发历程,王亮感慨,“我们要打造一支‘利箭’,用科技创新践行复旦学子的使命和担当。”

组 稿
融媒体中心
来 源
航空航天系
文 字
张晋川
编 辑
卞凯玥
上观号作者:复旦大学