无人机测绘教程视频(无人机测绘0基础入门到放弃(二))
书接上回,第一回的链接如下:
张寒轩:无人机测绘0基础入门到放弃(一)93 赞同 · 18 评论文章
本系列文章严禁转载,我本人保留所有权益哦。
3 无人机生产数据介绍
前文已经提过,无人机自动化生产的数据大致就那么三种:真正射影像图、倾斜模型、点云。衍生品也算上的话,还有数字表面模型(DSM)。以上产品均可以准自动化生成。
真正射影像图

所谓真正射影像,其实跟大家平时在互联网上看到的卫星影像图非常像,但比卫星影像更棒一些。棒在哪里?棒就棒在真正射影像实现的是真正的垂直投影,与我们使用全站仪、GPS-RTK设备采集的地形图基础理论一致。
无图无真相,一图胜千言,来看图吧
 图片来自网络,侵删
图片来自网络,侵删传统的航测数据生成的成果类似于左图的样子,能看到楼的立面,你在在线地图上可以发现几乎都是这个样子,高楼的效果比较明显一些。这种产品叫正射影像图(DOM),是传统测绘四大产品(4D产品)之一。右边的图就看不到楼房立面,建筑直上直下形成正射投影,叫真正摄影像图(TDOM)。

我们使用的相机几乎都是使用中心投影原理实现的摄影,如果在视野范围内有高耸建筑,摄影时会把建筑物立面也拍进去。但从实际应用角度来说,我们希望使用的是正射投影。正射投影拥有完美的数学关系,可在地图上进行直接量测得到距离信息或计算坐标信息(当然DOM也可以量测,只不过在局部有遮挡)。上述这点是地图测绘的重点,即测绘成果不只是一张可以看的图,还得能在图上做量测,如果需要能做量测,则图上必须处处均匀。
那么带有畸变的相机照片是如何生产处处均匀的(真)正射影像的呢?这可不只是把图片拼起来那么简单。
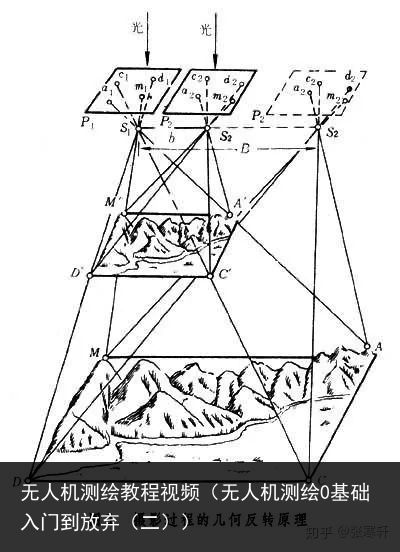
使用两张带有重叠的照片,假设已知两个拍照点的坐标和照片朝向信息,对于地面上相同的一点(同名点)可以在两张航片上找到对应像素点,再根据照片坐标、姿态,和传感器尺寸、像原点偏移、主距(一般直接使用焦距代替,但你应该知道这不是一个东西)、照片成像尺寸解方程,即可求得同名点坐标。通过这样的方法我们就可以“测量”出地面上的一个点坐标,反复使用该方法,测出你所感兴趣的所有地物点,如果是线状的再将点连成线,如果是面状的再将点连线构面,就成了普通的地形图。
在传统摄影测量时期,我们需要在两张照片上对同名点分别刺点,软件可以自动计算坐标。但对于人工刺点来说,将地面所有地物都刺出来仍然是巨大工作量,因为不光要刺出来,还有左片和右片对应起来,如果刺偏了,软件解算出来的点位精度低,可能还要重新刺点。想象一下一次载人航摄可能有上千张照片,每张照片又要刺上千个点,这也是个工程。
相机畸变导致了相片不均匀,在进行测量应用时,必须纠正畸变。至于什么是畸变,打开你的手机相册,找一张大合影,注意观察相片边缘处的人脸就知道了。
精灵2的相机畸变非常大,有点像球形畸变了,在后处理软件遇到这样的照片时,会将边缘部分畸变过大的内容切除,实际拍摄内容减少,这也是无人机航测比载人机航测重叠率要求大的原因之一,剪切掉后,相当于降低了重叠度。专业航摄仪几乎没有畸变,典型重叠度要求航向60%,旁向30%;无人机航摄典型重叠度要求航向80%,旁向60%,根据测区和飞行计划进行调整,最高能到95%重叠度。(具体的重叠度设置会在后面的文章讲述)
重叠度即两张相片拍摄相同区域占整幅相片的百分比。使用微分纠正方法,可以将中心投影的相片纠正为正投影的相片。但这过程中间,需要地面高程进行改正计算,以前我们都使用数字高程模型(DEM)来做纠正,但DEM这个数据是不包括地面的建筑物、构筑物、桥梁、树木等地物的,所以以前做的正射影像就把楼“歪歪的按在地上”;
后来航测软件自动生成同名点,自动匹配解算后,可以生成数字表面模型(DSM),数字表面模型包括地表所有内容,是最真实的地表模型,所以使用DSM去做微分纠正时,我们就可以把建筑都纠正成正投影。真正射影像图一样拥有直观性、可量测性。
ok,你现在知道什么是真正射影像图了吧?
现代无人机后处理软件所拼出的图像都是经过照片纠畸变、微分纠正的,而且全部自动化从生成DSM到微分纠正无需(也不能)人工干预。
倾斜摄影模型
倾斜摄影的原理其实还是使用了摄影测量原理,只不过倾斜摄影增加了拍摄建筑物立面的相机,倾斜相机可以是2个,可以是4个,也可以是8个,还可以是摆动式的,总之能采集倾斜方向的数据即可。严格的说,你在客机上随手拍的照片也属于倾斜摄影,当追溯倾斜摄影历史时,可以直接追溯到二战时期,再说白一点,不就是拿相机去飞机上拍照片了么,拍摄敌军阵地信息,但这种直接成像不具有可量测性,不属于测绘产品。
这样建筑物的立面信息也可以被完整的采集下来,以供建模使用。多个方向对相同地物做采集,补充。

倾斜摄影模型的最大特点是与环境融为一体,不像人工建模,一看就是计算机生成的模型。对比一下看看:

至于说哪种模型更为真实,仁者见仁智者见智吧。
倾斜模型在三维空间里同样具有可量测性,有了模型之后,各种应用比如日照分析,通视分析,水淹分析等等都有了直观的感受。
其实利用计算机屏幕表示的三维模型不能算是真正的三维,计算机屏幕表示三维的方法是利用旋转视角和阴影等色彩效果“欺骗”大脑,以达成空间三维感官,这是在用二维表示三维,缺乏真正的空间纵深感。反过来说,如果在三维模型里不能旋转视角,你还会觉得这是三维的吗?不过未来也许能在VR里测图也说不定呢,VR算是有纵深感了吧。但倾斜模型也不是没有缺点。

正面看没有什么问题。
视角拉低之后惨不忍睹。
倾斜摄影使用纯影像方式进行建模,如果照片拍不到的细节,建模一定就建不出来;有时,即时单张照片拍摄到了,但不能在多张照片里找到同名点,建模依旧会失败。倾斜摄影在建筑物底部的表现效果是最差的,有拉花,有破洞都是常见现象。因为建筑底部在照片中存在的尺寸太小了,为了优化效果,尽量降低航高,提升相机焦距、像素。
倾斜摄影一张皮,看上去没什么问题,数据立面无法区分各个建筑,但现在已经有不少公司在想这个事,能做一些“曲线救国”的工作。
根据摄影测量原理,当场景中出现透明、半透明、镂空、反射、流动水域、流动沙地等无法自动识别同名点的材质时,生成的模型也会不尽人意。我曾经以为草原地貌建模也会有问题,实地测试没有一点问题,可能是我遇到的草原不够动感吧,笑。
好像说了很多倾斜摄影的坏话?不,其实不是的,以上只是倾斜摄影技术上自身的缺点,如果这些缺点均对你的使用场景不构成痛点,就可以大胆使用,相当于是保底技术。
点云
点云文件是由机载lidar(地面也有类似的设备)产生的,通过高速转动的激光头,扫描测量地面点,形成大量的点坐标数据,在后处理软件中看起来像一团团的云。当点云密集的时候看起来也像模型似的成面状,但当放大之后,就看不到面而是点了。
点云有单色点云,带有强度信息的点云,和彩色点云。单色点云就类似于全站仪测出的点,所有点均用相同颜色,相同明暗度的点表示;根据不同材料反射回来的激光强度不同,按照反射强度表示的点云,称带有强度信息的点云;在点云设备采集数据的同时,使用可见光相机拍照,然后通过算法着色的点云称为彩色点云。然而实际上,这几种点云表示方式可以同时存在,只在内业处理时,选择不同的显示方式即可。
 单色点云
单色点云 强度点云
强度点云 彩色点云
彩色点云在内业工作时,还可以使用工具将点云自动分类分色显示、按高程分色显示等等。
相比于倾斜摄影,点云数据精度更高一些,每个点的位置是准确的,不会出现倾斜摄影中扭曲的问题,但由于遮挡的问题,点云数据也总是会存在绝对漏洞,对反光材质也没有特别好的办法,数据量较倾斜摄影原始文件略小。
哇,这个前言真的是越写越长了,什么都想写一点。下次文章应该将会结束前言部分。
张寒轩:无人机测绘0基础入门到放弃(三)65 赞同 · 6 评论文章