飞马e2000无人机怎么样(飞马D2000无人机在乡村规划设计中的应用——以鹤山市雅瑶镇陈山村为例)
鹤山市在“三清三拆三整治”的基础上提出了更高的目标和要求,陈山村在《鹤山市域乡村建设规划(2018-2035)》中被划入改善提升类村庄,本次村庄规划促进村庄经济发展。将农村人居生态环境综合整治与农村基础设施提档升级工程。随着无人机航测技术越来越普及,其逐渐应用于乡村规划设计领域中,但目前大多数应用还停留在基础调研及数据获取层面,对其更深层次的应用相对较少。本文以广东省鹤山市雅瑶镇陈山村为例,介绍飞马系列无人机航测技术在乡村规划设计中的应用。最后指出无人机航测成果能高效且精细地进行场地认知,设计方案与实景模型的结合能直观且真实地展现设计效果,以期对今后无人机航测在乡村规划设计中的应用与研究有所启发。
关键词:乡村规划;飞马无人机;倾斜摄影;无人机航测应用;01项目背景及意义1.1 项目背景及意义本次项目依托十九大报告明确提出实施乡村振兴发展战略,村庄规划,改善人居环境,促进乡村振兴发展的需求对鹤山市陈山村进行规划,在乡村规划设计过程中,场地原始信息资料收集是指导规划设计的前提,也是规划设计中确定点位和计算工程量的重要依据。目前,我们可利用卫星地图、CAD图纸以及业主提供的场地信息等方式来获取设计区域的基础资料。但这些方法过于被动,卫星地图对地理信息的变化难以做到及时更新,CAD图所显示的内容无法保证地物信息的准确性与完整性,均使后期设计工作产生误差。近年来迅速发展的无人机航测技术,以其机动灵活、作业高效迅速、可快速获取三维数据和低成本等特点,受到各行业的广泛应用。用大范围、高精度的方式全面感知复杂场景,以高效的数据采集设备及专业的数据处理流程来获取三维数据成果,高分辨率的实景三维模型和正射影像图直观反映地物的外观、位置、高度等属性为山村改造规划方案提供现实依据、为改造决策提供详细准确的资料,服务于规划设计和领导决策。02技术方案2.1 作业依据与成图精度2.1.1 主要依据以下国家标准和行业规范(见表1):表1 技术依据序号
标准名称
标准代号
1
《全球定位系统城市测量技术规程》
CJJ73 97
2
《航空摄影技术设计规范》
GB/T19294-2003
3
《城市测量规范》
CJJ8 99
4
《1:500、1:1000、1:2000地形图图式》
GB/T7929-1995
5
《1:500、1:1000、1:2000航测内业规范》
GB7930-87
6
《数字测绘产品检查验收规定和质量评定标准》
GB/T18316-2001
7
地球空间数据交换格式
GB/T 17798=1999
8
1:500、1:1000、1:2000
地形图航空摄影测量数字化测图规范
GB 15967=1995
9
国家测绘局《GPS辅助航空摄影技术规定(试行)》
10
国家三、四等水准测量规范
GB 1289891
11
数字测绘产品质量要求第1部分:
数字线划地形图,数字高程模型质量要求
GB/T17941.1=2000
12
《1:500、1:1000、1:2000航测外业规范》
GB7931-87
13
《测绘产品检查验收规定》
CH1002-95
14
《测绘产品质量评定标准》
CH1003-95
2.1.2 成图精度
(1) 平面精度
内业加密点和图上地物点相对于邻近平面控制点的平面位置如表规定
表2 中误差及图上邻近地物点间距中误差(m)

注:隐蔽和困难地区, 平面和高程中误差可放宽 1. 5 倍。
(2) 高程精度
表3 内业加密点、高程注记点、等高线插求点的高程中误差(m)
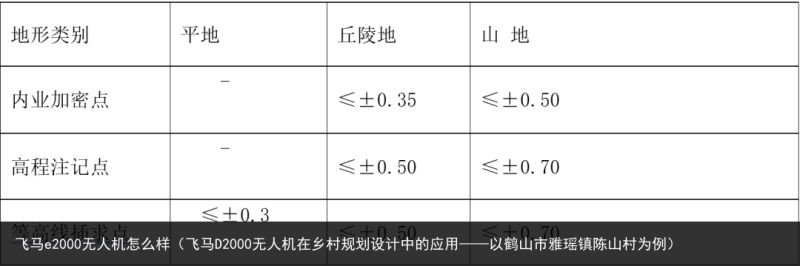
注:点位中误差为地物点对最近已知控制点的中误差, 高程中误差为高程注记点, 等高线对最近水准点的高程中误差,极限误差规定为中误差的2倍。
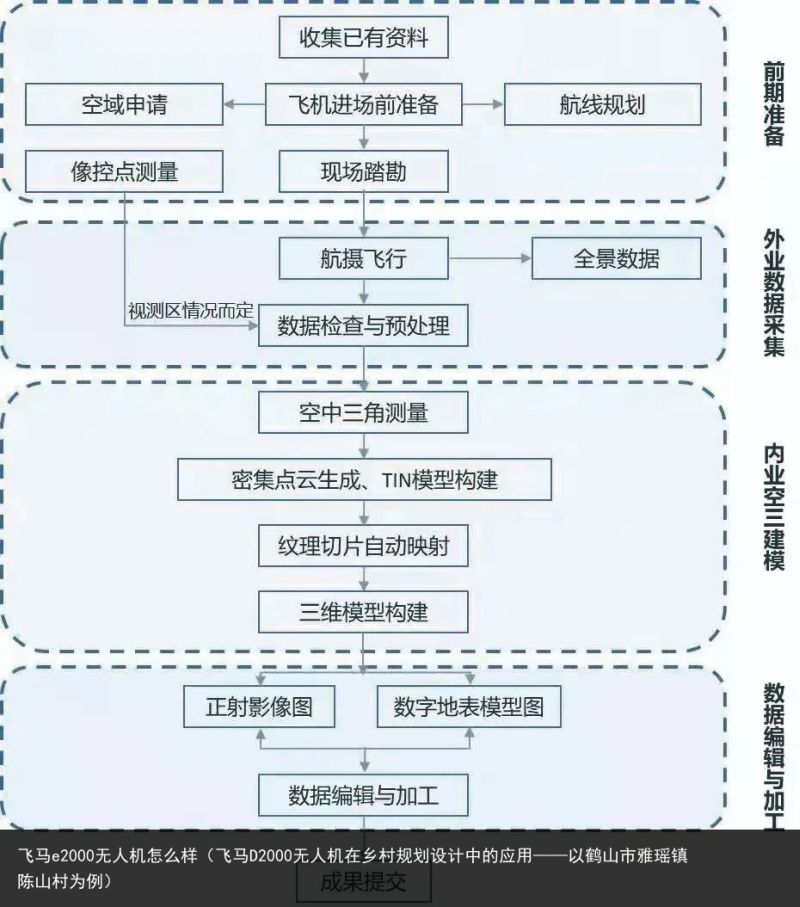
2.2 无人机航测技术路线
技术路线分为前期准备,外业数据采集、内业空三建模、数据编辑与应用四个流程。首先通过无人机航飞摄影获取整个陈山村及其周边范围的航片,内业使用无人机管家软件和Context Capture软件建立倾斜三维模型,输出正射影像图及实景三维模型。
3.1 测区概况
陈山村在《鹤山市域乡村建设规划(2018-2035)》中被划入改善提升类村庄,并归为旅游型村庄。陈山村位于雅瑶镇区北部,地处南亚热带季风区,属于低丘陵地区,土地资源丰富,土地肥沃,雨水充沛,具有丰富农业气候资源,村域内分布有多处水塘,水体景观丰富。平均气温22℃,年平均降雨量1700毫米。以耕地、园地、林地、村庄建设用地、水域及水利设施用地为主严格控制村庄建设用地边界,村庄各项基础设施规划建设、公共服务设施规划建设、新增农房建设等均应控制在村庄建设用地范围内



图2 陈山村区位图
3.2 设备介绍
本次鹤山市陈山村规划设计使用的是飞马D2000无人机,其成像速度快,成本较小,耗费人工劳力小,快捷方便,,无人机参数如下表4:
表4 无人机规格参数
导航卫星
GPS:L1+L2(20Hz)
BeiDou:B1+B2 (20Hz)
GLONASS:L1+L2 (20Hz)
差分模式
PPK/RTK融合作业模式
空机重量
6.5kg
起飞重量
8.5kg
对称电机轴距
988mm
外形尺寸
展开830x732×378mm
折叠955×362×378mm
续航时间
48min (单架次海平面悬停时间)
巡航速度
13.5m/s
最大爬升速度
10m/s
最大下降速度
8m/s
悬停精度(单点)
水平1.0m,垂直0.5m
悬停精度(RTK)
水平±1cm+1ppm,垂直±2cm+1ppm
实用升限高度
4500m(海拔)
抗风能力
5级(正常作业)
任务响应时间
展开≤10min, 撤收≤15min
测控半径
5km
起降方式
支持遥感起降方式
工作温度
20~50°℃
3.3 作业主要流程3.3.1 现场踏勘及航线规划
项目涉及的改造内容均在村庄建设范围内,其中包涵雅瑶镇村委及陈山村周边广场、农宅、农田、自然植被、道路以及水塘等,要素故以此选定为航测区域,航测区域为矩形,地势平坦,飞行面积5.491k㎡。航线规划软件为飞马无人机管家,划定航飞区域后软件自动规划航线见(图3)及参数见(表5)。

图3 航线规划图
表5 飞行参数
测区面积
5.491 km²
地面分辨率
2.77cm
航向重叠率
80%
旁向重叠率
80%
飞行速度
14m/s
拍照间距
24m
飞机架次数
10架次
影像数量
38949张
相对航高
191m
3.3.2 像控点布设航向方向按照 4-5 条基线, 旁向方向逐条航线进行布设。
布点时应注意, 所布点应能有效控制住成图范围, 测段接头处不得有漏洞。
共计布设像控33个点。

图4 像控点布设现场
3.3.3 外业航飞
航线规划后到达测区,无人机管家软件上的智飞行,一键起飞进行拍摄任务,任务完成后设备自动返航,拍摄时间在严格控制在上午10点至下午3点获取,通视效果良好,共获取原始数据照片约4万张。


图5 D200无人机现场飞行照片
3.3.4 影像数据检查与预处理
先在飞马无人机管家软件上对pos数据进行GPS坐标转换与解算处理,在保证影像拼接完整的情况下,对影像数据进行筛选使pos数据与影像数据保持一致后将pos数据写入照片。最终保留有效照片3890张,其影像清晰、反差适中符合航测成图及数据处的要求。
3.4 正射影像及倾斜三维建模
3.4.1 空中三角测量
在获取航测所需的影像图后,本项目采用ContextCapture软件完成空中三角测量计算和三维模型构建。因本项目照片数据量较大,为提高空三效率和保证空三能正常进行,在进行空三处理前将所有影像合并为一个大区块,然后通过建模软件的照片分块功能将摄区影像共分成了3个空三子区块(见下图6),同时保证相邻空三子区块具有200米的重叠,并且相邻空三子区块的接边处保证有足够的像控点,平均每个空三子区块的照片数量约为一万五张左右,将3个区块分别进行空三。。

图6 空三分块图
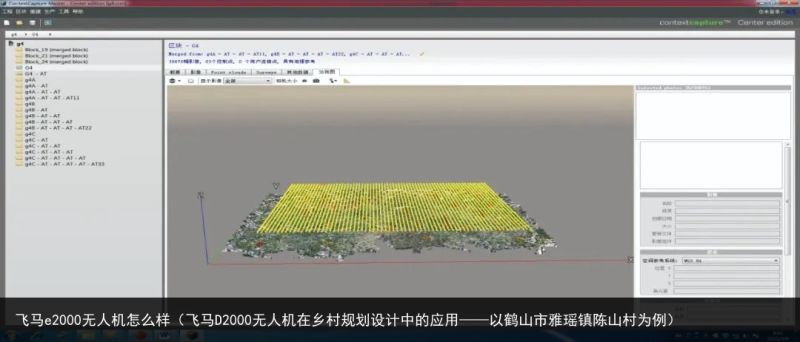 图7 空三成果拼接图
图7 空三成果拼接图
3.4.2 三维模型构建
空三结束后即可进行倾斜三维模型的生产工作,模型的生产在空中三角测量成果上进行。先将模型切块处理,再提取测区密集点云构建不规则三角网,最终得到带有贴图信息的三维模型[10]。

图8 三维模型成果图



农田 - 农宅– 山 - 路
图9 三维模型细节展示
3.5 数据编辑与加工
3.5.1 正射影像图
测区的正射影像图(DOM)。用Global Mapper软件打开,导出后叠加村界,最后用Photoshop软件制作村庄二维专题图(图10),可解读村庄建设范围内用地情况等。

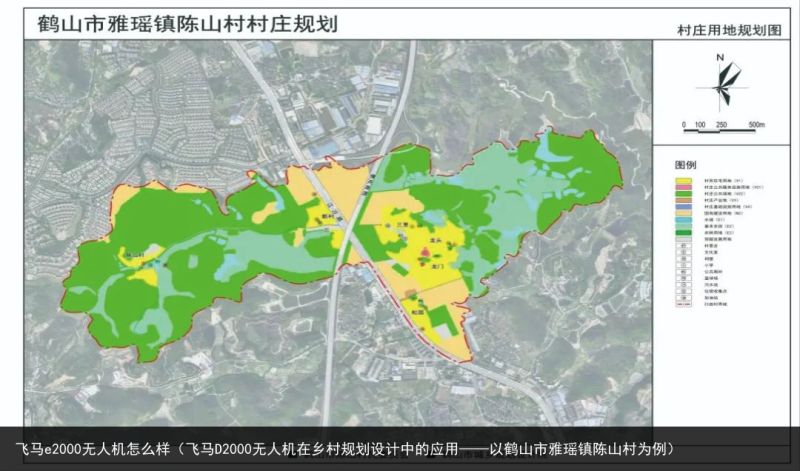
图10 正射影像图及其应用
04解决的生产问题4.1 减少现场调研的次数,降低规划人员调研风险
雅瑶镇陈山村地市偏僻,因受交通距离和项目周期的限制,项目组因受交通距离和项目周期的限制,现场踏勘的次数有限,以至于无法全面地测绘村庄现状。现场踏勘的次数有限,以至于人力无法全面地测绘村庄现。无人机航测的出现解决了这一问题,其成果主要为雅瑶镇陈山村改造规划方案提供仿真环境和地理空间数据,造项目设计方已经将该项目成果应用于项目场地认知,确定村庄建设范围内空间布局、道路交通村民住户情况确立改造成本及规划方案,全程可视化。这样可以提高高工作效率,减少现场调研的次数,对乡村危险禁区进行调研,包括环境污染区域,大型垃圾填埋场、污水处理厂等、地质灾害隐患区,矿场采空区、山体滑坡点、淹没区等,降低规划人员调研风险。

图11 三维模型浏览
4.2 减少因场地数据错误引发后期设计修改而带来的额外工作量航测生成的实景三维模型表面附有基于航拍照片生成的贴图,还原度较高,效果直观且逼真。场地现状的细节被最大程度地保留并呈现,浏览模型时可以旋转和缩放,方便各个角度观察和研究场地细节,利用无人机的三维模型可随时仔细地浏览现状模型,弥补了现场勘探缺失和现状照片的不足。生产后的实景模型可在ContextCapture Viewer软件及Cass3d软件中测量任意两点的距离、高度,测量任意区域的面积,曲面及土方量对于大范围的尺寸测量方便快捷,是名副其实的数字沙盘,以此模型为基础进行设计深化和方案推敲,设计准确性好,精度高,能减少因场地数据错误引发后期设计修改而带来的额外工作量。
图12 数据测量
05精度验证由于本项目未提供精确的现状CAD图纸,因此采用随机抽样的方式量取测区内建筑尺寸,将实际尺寸与模型尺寸进行对比后得出误差值,以此评价模型的精度,其中实测尺寸为3次测量的平均值。由于观测量真值未知,因此用改正数来确定误差(白塞尔公式),其中误差:
v为最或是值与观测值之差,n为抽样个数,即:
经计算模型误差小于5cm,误差较小,说明本项目生成的模型精度较高。模型与实测尺寸数据对比见表6。
表6 精度验证
序号
抽样位置
实测尺寸mm
模型尺寸mm
模型误差mm
1
陈山村委办公楼面宽
10000
10020
+20
2
旁靠近山地农宅面
10000
10050
+50
3
村委东侧第一户农宅大门宽度
2220
2200
+20
4
村委东侧第一户农宅窗宽
1800
1790
-10
5
村沿线花池宽度
2200
2215
+15
6
农田区域东侧面宽
7000
6983
-17
7
陈山坑农宅宅村道
5000
4996
-4
8
佛开高速路宽度
42000
42030
+30
06创新型应用介绍6.1 无人机航测介绍
航测是航空遥感技术的一种,在测绘行业中是获取高程、空间坐标等地理信息数据的重要方法[1]。无人机航测技术是以无人机作为空中平台搭载数码相机、摄像仪等遥感设备,通常在1000m高度以下收集测区影像,最后利用计算机处理、制作和储存数字化成果的新技术。是传统航空摄影测量手段的有力补充,具有机动灵活、高效快速、精细准确、作业成本低、适用范围广、生产周期短等特点,在小区域和飞行困难地区高分辨率影像快速获取方面具有明显优势,无人机航测技术是对传统航空的摄影测量的发展,本身具有精准度高、效率高、灵活性高与操作简单的特点[2],被广泛的运用到步行很难通过或者飞行比较困难的地方进行测绘,以此来获得区域内的高清图像、所以无人机能够本次规划项目方面发挥重要作用。
6.2 无人机航测在本次乡村规划设计中的应用优势
6.2.1 精准辨别地物信息
陈山村部分地区隐蔽复杂,而无人机具有较为灵活的飞行高度,可精准清晰的拍摄地物信息,协助规划人员借助地形图和高卫星影像图完成地物信息判断,诸如建筑屋顶样式、宅院闲置状况、道路硬化状况、路灯分布状况、广场空间、垃圾堆放点等(图13)。
图13 地物信息判断
6.2.2 扩展调研范围提前预设规划范围预设
无人机因其飞行范围广,受地形限制较小,可将调研范围覆盖至乡村建设范围之外。对村庄外围的山体状况和水系分布等自然环境进行飞行观察,获取有效自然环境信息;对农田、果园等进行可视化识别,对应生产空间标绘保障调研工作安全无死角展开。
图14 范围规划预设
6.2.3 为设计方案提供沟通图纸
无人机航拍摄影构建真实场景(即倾斜摄影技术),通过对建模的物体场景拍摄一定重叠率的照片,快速的构建出来乡村实景模型。并导入3dmax、lumion等设计表现软件,协同规划设计内容表现方案设计效果。其优势在于清晰且直观,不同于平面化专业图纸的抽象性,航拍影像结合规划设计内容,以真实场景位置索引方式,呈现规划设计的空间思路、位置关系等内容。方便规划师向村民解说设计方案,用村民看得懂的图纸进行沟通。
图15 现场方案提供沟通
6.2.4 为传统村落、古建筑建立数字档案
结合无人机航测生成的正射影像获取地物顶部三维空间信息,无接触测量模式能有效避免传统测量手段对古建筑的“二次伤害”,生成的高精度数字化三维模型可精确记录村庄整体风貌、物质空间形态、自然环境特征、建筑物构建尺寸和拓补数据等信息,切实保护村庄的整体空间形态与环境,全面保护文物古迹,历史建筑、传统民居等传统建筑;加快改善村庄基础设施和公共环境,合理利用村庄特色资源,发展乡村旅游和特色产业,形成特色资源保护与村庄发展的良性互促机制,为历史遗产型村落的研究和保护提供完整信息。
07成果展示阶段本次无人机航摄三维模型和正射影像对地理信息的变化做到及时更新,内容保证地物信息的准确性与完整性,其乡村规划成果图如下
图16 规划项目布局及农房建设图图17 新增公共设施及建设项目表
08结语本文以飞马d2000无人机对鹤山市雅瑶镇陈山村所采集的航空摄影测量数据为基础,结合无人机管家软件、Context Capture软件生成实景三维模型,针对无人机航测如何应用于乡村规划设计这一问题进行了研究,从获得的各项数据成果中可以看出,无人机航测的成果具有高精度、高效率、低成本等优势,对后期方案设计效率和精度的提高有极大促进作用。同时无人机航测和三维建模体系共同构成了一个高效的数据生成平台,便于设计成果预览及汇报,为规划工作提供了极大地便利。但是随着城市化建设水平的提高,实景三维模型建设也面临不少挑战。就本项目而言,需注意以下技术难点:
1、影像数据量大,进行空三时需要将影像划分为子区块后再进行空三,各子区块的大小依据工作站的内存和配置来决定,本次项目不要超过一万五千张照片,各子区块间照片必须要有1倍以上航飞高度的重叠度,以保障区块合并时具有一定的影像重叠。
2、单个子区块在进行空三时,如果出现空三分层现象,要将此子区块各航飞架次分别空三后再合并为一个区块,此操作可减少空三分层现象。
3、本项目倾斜影像进行建模时,不能将各子区块单独进行建模,可以将各子区块合并为不超过10万张照片的大区块后,再进行建模,通过建模软件内部算法,可以有效避免模型色彩不均匀的效果。
4、本研究虽然能有效地将无人机航测成果应用于乡村规划设计过程中,但在效果展示方面不具备渲染功能。在今后的研究过程中需进一步结合各软件平台的优势,探索既能满足方案设计全过程需要又能满足成果展示的技术方法,为无人机航测应用于乡村规划设计提供重要的技术支撑。
参考文献:
[1] 王浩天.基于无人机航测技术的城市用地规划模型研究[J].北京测绘,2018,32(10):1174-1177..
[2] 李学友.IMU/DGPS辅助航空摄影测量综述[J].测绘科学,2005(05):110-113+8.
[3] 代成. 基于无人机倾斜摄影的交通基础设施规划方法研究[D].北京交通大学,2019.
[4] 史华林.无人机航测系统在公路带状地形测量中的应用[J].测绘通报,2014(06):60-62.
[5] 樊仲谋,周成军,周新年,吴能森,张世杰,蓝天华.无人机航测技术在森林资源调查中的应用[J].森林与环境学报,2018,38(03):297-301.
[6] 袁士才,刘书婷,唐忠海,陈章傑.无人机航测技术在乡村古建筑保护中的应用[J].智能建筑与智慧城市,2021(04):132-133.
[7]任敬,范宣梅,董秀军,杨琴,戴岚鑫.基于无地面控制测量校正影像的无人机航测应用 [J].人民长江,2017,48(20):62-66.
[8] 吴云东,张强.立体测绘型双翼民用无人机航空摄影系统的实现与应用[J].测绘科学技术学报,2009,26(03):161-164+169.
[9] 张文春,范洪洋,刘永吉,林楠,张海明.三维激光点云联合无人机影像的古建筑重建[J].测绘通报,2019(11):130-133+144.
[10] 程文宇,冯潇.低空多旋翼无人机航测在风景园林规划设计前期现场观测中的应用[J].中国园林,2018,34(11):97-101.
[11] 罗瑶,汤放华,莫文波,易海.基于SuperMap的二三维一体化城乡规划设计技术研究[J].城市学刊,2019,40(03):66-72.
END
打开抖音短视频/微信视频号搜索“飞马机器人
”
即可关注我们!