

无人机倾斜摄影超精细的原因有哪些(学而思 | 无人机倾斜摄影技术在 1∶500带状地形图测量中的试验及分析)
摘 要: 无人机倾斜摄影技术近年来在遥感与测绘领域得到了广泛应用。本文将无人机倾斜摄影技术应用到1 ∶500带状地形图测量中,探索自主构建海燕 UDP( UAV Data Processing) 无人机倾斜影像数据处理集群系统接口Smart3D 进行影像处理,总结了无人机倾斜摄影技术构建实景三维模型和测绘地形图的流程,并经试验验证地物点精度完全满足《城市测量规范》CJJ /T 8-2011 中数字线划图精度要求,在实际生产中具有借鉴意义。
关键词: 无人机; 倾斜摄影; Smart3D; 实景三维模型
引 言
20 世纪 20 年代诞生了最早的无人机,主要用于军事活动,但由于其特有的技术优势,后来逐渐延伸到民用领域和科研领域。随着无人机载荷、飞控技术和非量测数码相机的飞速发展,无人机倾斜摄影技术被引入测绘地理信息行业,突破了传统摄影测量对气候、空域、机场等条件的限制,并以其经济、快捷、机动灵活等特点,在应急抢险、抗震救灾、小范围快速成像成图等方面显示出了无法比拟的优势。
目前,1 ∶500 带状地形图的测量主要采用 GPS RTK配合全站仪测量。这种测量方式需要投入大量的生产成本,在测量难度大的地形破碎、复杂和建筑密集地区将延长测量周期,进而导致工作效率低、生产成本高。无人机倾斜摄影系统起降场地要求低、投入人员少,数据获取及处理效率明显高于地面传统测量,只需在处理后的实景三维模型上采集数据,经过简单外业调绘即可成图。
本文通过试验验证,在航测地面分辨率优于 2 CM 状态下,采用海燕 HY-X2 多旋翼无人机倾斜摄影系统进行 1 ∶500带状地形图测量,经过验证地物点精度完全可满足城市测量规范精度要求。
1 无人机倾斜摄影系统简介
本试验采用自主研制的海燕 HX-X2 多旋翼无人机倾斜摄影系统,它是一套高机动性、低成本和小型化、专用化的航测系统,是集多轴无人驾驶飞行器、GNSS 导航定位、倾斜摄影相机等技术于一体建立起来的。主要包括无人机飞行平台、倾斜摄影相机系统、飞行控制系统,以及地面站、地面数据处理系统、远程无线通信装置等辅助设施。
1) 无人机飞行平台。
由于多旋翼无人机具有成本低,飞行平稳等优点,本试验采用一套六轴的多旋翼无人机平台,该平台主要技术参数见表 1。
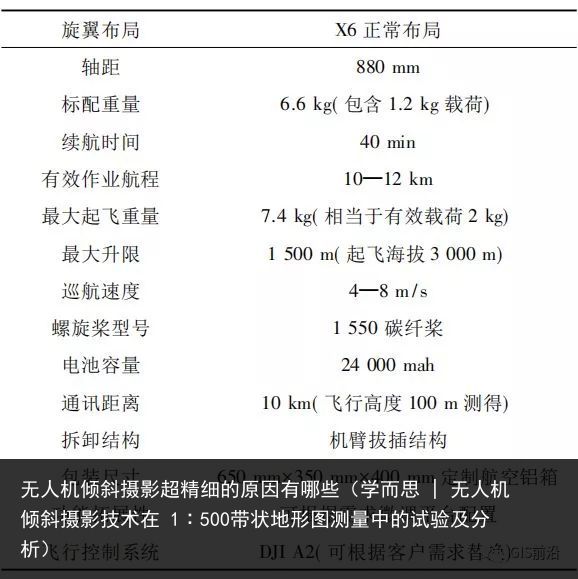
表 1 海燕 HX-X2 多旋翼无人机平台技术参数
2) 飞行控制系统。
飞行控制系统用于飞行控制及任务设备管理,便于地面人员掌握飞机姿态、速度、航向、航高等各种参数,主要由自驾仪、姿态陀螺、GPS 定位装置、无线电遥控系统等组成。本试验中使用大疆 A2 型无人机飞控导航系统。
3) 倾斜摄影相机系统。
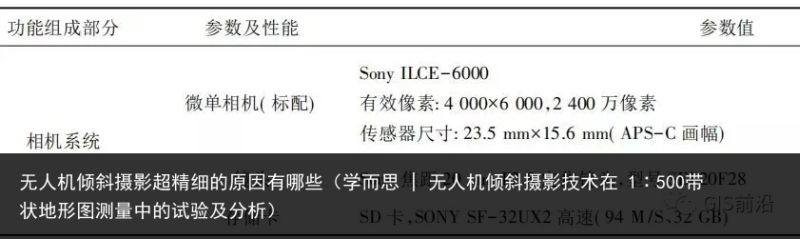
本试验中采用的相机系统是一套双相机倾斜摄影相机系统。该相机系统由相机系统、摆扫系统、控制系统、GNSS 等几个部分组成。整套系统采用无人机动力电源供电( 用于相机、云台、GNSS 等供电) ,无须提供专门的独立电源; 提供独立于无人机平台的 GNSS 系统,可记录与相机同步的 GNSS 信号采集,用于后续数据处理的位置参数; 整套系统重量为 1.2 kg。系统安装接口简单,适用绝大多数旋翼型无人机,如大疆、零度等。表 2 给出了整套系统的详细技术指标。
 打开凤凰新闻,查看更多高清图片
打开凤凰新闻,查看更多高清图片表 2 海燕 HY-X2 多旋翼无人倾斜摄影相机系统技术参数
4) 地面控制系统。
地面控制系统的主要功能包括航摄前期测区查询、航线敷设、参数设置,航摄实时飞行参数显示,辅助飞行和后期统计输出导航文件、影像飞行质量检查等。
5) 地面处理系统。
随着实景三维模型在智慧城市、仿古建筑等测绘地理信息领域的广泛应用,用户对实景三维模型的成像质量、精度的要求不断提高,普通的 PC机或服务器无法通过并联方式解决几何级数增长的倾斜摄影数据。针对倾斜摄影获取的影像数量多、图像几何关系复杂等难题,基于流行倾斜摄影三维建模软件,采用系统集成优化的方案,探索自主构建了海燕 UDP ( UAV Data Processing) 无人机倾斜影像数据处理集群系统,相比于市场上数据处理集群系统集成商构建的系统具有针对性强、操作控制简单、可扩展性好、计算性能好、处理软件适应性好等特点。该系统由计算节点( 包括建模节点和空三节点两类) 、存储中心、集群主控、机柜等几个部分组成。整套系统安装接口简单,适用大多数无人机商业软件多节点计算功能,如 Smart3D、Photoscan、Pix4D 等。整套系统的详细技术指标见表3。
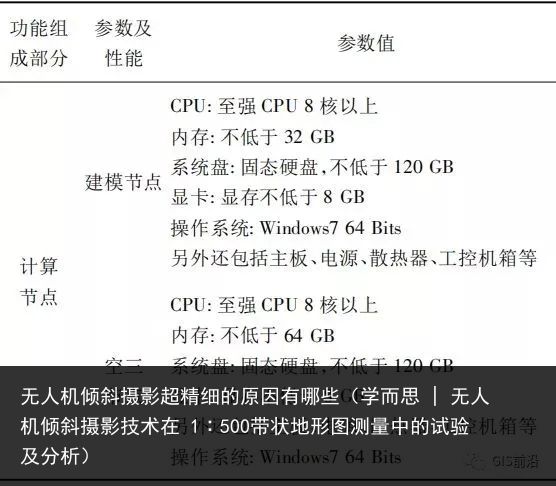
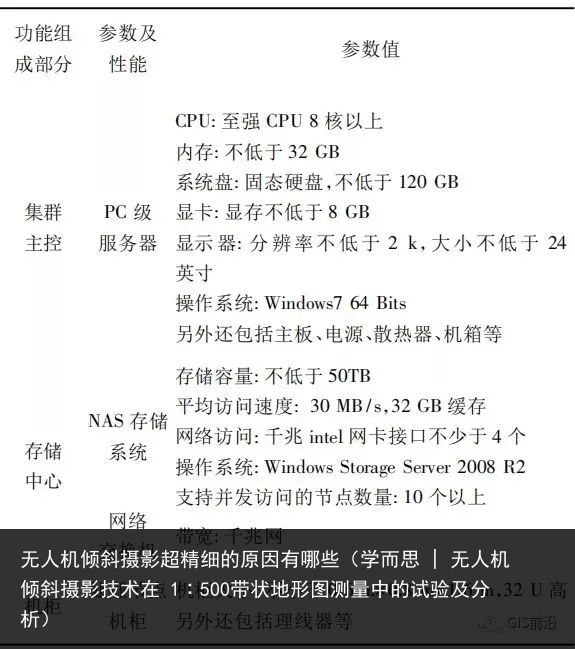
表 3 “海燕”UDP 无人机倾斜影像数据处理集群系统功能组成及技术指标
2 试验及分析
2.1 试验区概况
试验选取长春市二道区中的村镇开展 1 ∶ 500 带状地
形图测量试验。试验区全长 1 km,带状宽度约 300 m,试验区为平原地貌,最大相对高度约 80 m。根据测图设计要求,需要提供试验区内全要素 1 ∶ 500 带状地形图( 沿中线两侧各 150 m 范围) 。
2.2 无人机航测
试验采用海燕 HX-X2 多旋翼无人机倾斜摄影系统
进行航测,技术流程如图 1 所示。
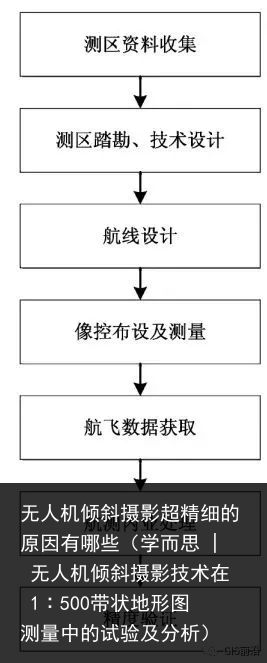
图 1 无人机航测技术流程
1) 前期设计
在飞行设计前对试验区概况进行了了解并收集了相关资料,如试验区高分辨率遥感影像、地形图、GNSS 控制点坐标等,并到测区现场进行了踏勘。根据成图要求及测区地形起伏状况,本试验设计了 4 个航摄架次,航高根据海拔高度设置为 100 m,地面分辨率优于 2 cm。根据状测区几何特点( 接近规则矩形) ,在测区均匀分布了 8 个控制 点 和 30 个 检 查 点, 检 查 点 和 控 制 点 间 距 200—300 m,对于无明显特征地物点区域,放置了棋盘格控制点靶标,控制点坐标采用 GPS RTK 测量,精度为图根级,如图 2 所示。
图 2 试验区飞行航线及控制点、检查点分布示意图
2) 航摄数据采集
将规划好的航线载入飞行控制系统,地面控制子系统按照规划航线控制无人机飞行,倾斜摄影相机系统则按预设的航线和拍摄方式控制相机进行拍摄。本试验共获取影像 6 000 张,采用人工选取同名点的方法计算相邻像片的重叠度和旋偏角,利用飞控数据和导航数据来检查航线的弯曲度、同一航线的航高差等参数,经检查均达到相关要求。
3) 航测内业处理
本试验采用海燕 UDP 无人机倾斜影像数据处理集群
系统,接口软件采用商业 Smart 3D 软件。主要处理图像畸变差纠正、图像匹配、平差、三维产品制作等。
2.3 成果及精度评定
1) 处理成果
经过航测内业处理完成了试验区实景三维模型产品、真正射影像和 DSM 的制作,如图 3 至图 5 所示。

图 3 试验区实景三维模型图
图 4 试验区真正射影像图
图5 试验区数字表面模型图
2) 精度评定
在测区共布设了 38 个平高控制点,从 38 个控制点中取 8 个作为内业平差处理的绝对控制点,其他 30 个作检查点,不参与平差计算。通过在 EPS 地理信息工作三维模型中采集检查点坐标和高程值进行对比分析。
据规范《测绘成果质量检查与验收》的高精度检测中,测中误差按式( 1) 计算,检查点误差对比分析情况见表4。
式中,M 为中误差,n 为检测点个数,Δ 为较差。根据式 ( 1 ) 计 算, 检 查 点 出 平 面 位 置 中 误 差 为1.2 cm,高程中误差为± 12.7 cm。精度完全满足《城市测量规范》CJJ/T 8-2011 中数字线划图精度要求。
表 4 检查点误差对比分析情况表
3 结束语
本文将无人机倾斜摄影技术应用 1 ∶500 带状地形图测量中,经试验验证精度完全满足 1 ∶ 500 地形图规范要求。可以看到,因无人机具有生产成本低、投入人力少、极大地缩短了复杂地形地貌生产周期的特点,且能满足地形图生产精度要求,因此,无人机倾斜摄影技术将在地形图测量乃至建筑物密集的地籍测量中得到广泛的应用。需要指出的是,本文只是试验了航测地面分辨率优于 2 cm 平原地区的无人机倾斜摄影测量地形图的精度,对于地形起伏更大地区和城区航高要求更高地区的精度验证情况需进一步开展试验。
文章转载于测绘与空间地理信息
作者:魏来
本文仅限行业学习交流之用,版权、著作权归原载平台及作者所有,如有侵权,请立即联系删除。
- END -



