

无人机倾斜摄影工作流程(倾斜建模案例分享︱如何提高高速公路无人机倾斜摄影测量精度?)
更多倾斜建模、激光点云前沿资讯,关注“三维前沿”
摘要
采用固定翼无人机对拟建云南高速公路进行长距离带状大面积倾斜摄影测量及实景三维模型建立,采用旋翼降低航高,以优于 0. 05 m 的分辨率对建模区分布的 13 个村庄重新进行倾斜摄影测量及实景三维模型建立,并将两个模型进行融合,消除了位于高山峡谷底的村庄建筑物区模型模糊、拉花、纹理不真实、精度差的现象,尝试拟建云南高速公路无人机倾斜摄影测量与实景三维模型建立方法改进。
关键词
无人机倾斜摄影测量; 实景三维模型; 分辨率; 航高; 航向重叠度; 旁向重叠度; 模型精度
引言
倾斜摄影测量是新时期高科技成果的重要代表,其应用的有效性与当前人们的需求密切相关。而无人机具有机动、灵活、快速、经济等特点,采用无人机进行倾斜摄影测量是目前倾斜摄影测量的发展趋势,已应用于地质灾害监测、城市更新基础数据调查等。
拟建高速公路实景三维模型能将地形地貌以实景三维的形式逼真地表达出来供高速公路设计,从实景三维模型获取设计所需的各种信息数据,可为实现高速公路三维协同设计奠定基础。
云南拟建高速公路往往穿越崇山峻岭、湖泊沟壑或山间盆地,相对高差较大; 根据实际情况,采用适宜的高速公路倾斜摄影测量实景三维模型建立方法就显得十分重要。
本文引以为例的拟建高速公路总体呈南北走向,长 62. 1 km,建模范围为拟建高速公路设计中线两侧各 300 m,即带宽 600 m,建模面积 37. 26 km2;建模区最高海拔 2500 m,最低海拔 1000 m,相对高差1500 m; 北部区域横跨2500 m 高山,南部区域临近市区,相对较为平缓。
1 基于无人机倾斜摄影测量的实景三维模型建立技术
基于无人机倾斜摄影测量的实景三维模型建立技术是通过在飞行平台( 如固定翼或旋翼无人机) 上携带多台传感器( 一般用五镜头相机) ,从垂直和 4 个倾斜共 5 个方向同步获取物体的影像,然后利用高效的数据处理软件( 如 ZR-Smart 3D) 通过几何校正、区域网联合平差、多视角影像匹配、DSM 生成、TIN 构建、文理映射,最终生成实景三维模型。
2 拟建云南高速公路项目倾斜摄影测量
本文对拟建云南高速公路进行倾斜摄影测量实景三维模型建立,要求三维模型成果格式为OSGB 格式,三维模型的地面分辨率与相同比例尺的数字正射影像图的地面分辨率保持一致。该项目设计所用地形图、数字正射影像图比例尺均为1∶2000。
根据甲方及规范要求,影像地面分辨率应不低于 0. 2 m,考虑到以下原因: ①误差影响; ②建模区地形复杂: 高山峡谷相对高差较大; ③建模区纹理复杂: 建模区分布 13 个村庄。因此,最终影像拍摄分辨率采用 0. 1 m,采用多旋翼无人机倾斜摄影测量模式进行野外作业。
2. 1 倾斜摄影测量主要设备及技术路线
2. 1. 1 主要设备
软件: ContextCapture Center 4 套,用于数据处理硬件: ①固定翼无人机 2 架,用于野外飞行;②DM-5 Pro五镜头倾斜摄影云台相机,用于倾斜摄影获取影像; ③便携式联想计算机 4 台,用于航线规划、飞行监控、数据检查。2. 1. 2 航高与旁向重叠度计算
方法: 按不同航高,进行多个架次的航线规划。
①航高计算
摄影航高简称航高,包括相对航高和绝对航高。相对航高: 航摄仪物镜中心 S 在摄影瞬间相对于某一基准面( 通常是摄影区域地面平均高程面)的高度; 绝对航高: 航摄仪物镜中心 S 在摄影瞬间相对于大地水准面的高度。
设相对航高为 H,摄影区域地面平均高程面为H平,绝对航高为 H绝,则相对航高与绝对航高的关系式为H绝=H平+H
设相机镜头焦距为 f( 单位为 mm) ,像元为a( 单位为 mm) ,地面分辨率为 GSD( 单位为 mm) ,则相对航高 H( 单位 m) 计算公式为H =(f×GSD)/a
本文相对航高 H 的 计 算: f = 35 mm,GSD =100 mm,a = 4. 88,μ = 4. 88×10-3mm,则相对航高H =717. 2 m。
由 Google 地球可知,航摄区域最高点海拔2508 m,则绝对航高 H绝= 717. 2+2508 = 3 225. 2 m。
②像片重叠度计算
像片重叠度包括航向重叠度及旁向重叠度,计算公式为px= px+ (1-px )△h / H
py= py+ (1-py)△h / H式中,px,py分别为航摄像片的航向、旁向标准重叠度( 以百分比表示) ; △h 为相对于摄影基准面的高差,单位为 m; H 为摄影航高,单位为 m。
本文像片重叠度的计算: 一般取px= 65%,py=35%,△h、H 采用上例中的数值,即△h = 717. 2 m,H = 3 225. 2 m,则计算得 px= 72. 8%,py= 49. 4%。
2. 1. 3 主要技术路线
对建模区进行分辨率为 0. 1 m 的倾斜摄影影像拍摄,对影像数据进行质量检查及存储,若影像数据检查不合格则对其进行重飞至合格,主要技术路线如图 1 所示。
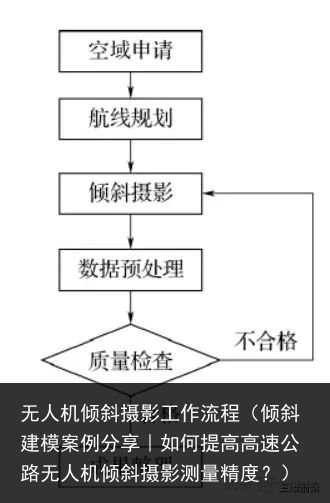
▲图 1 倾斜摄影流程
2.2 倾斜摄影测量成果
按航线规划 13 架次对建模区进行倾斜摄影测量,获取影像 94 385 幅,影像航向重叠度大于 65%,旁向重叠度大于 35%,像片倾斜角均小于 5°,像片旋偏角均小于 15°; 影像清晰,影像分辨率优于 0. 2 m。
3 拟建项目实景三维模型建立及成果
3. 1 实景三维模型建立主要设备及技术路线
3. 1. 1 主要设备
软件: ZR-Smart 3D,用于倾斜摄影空中三角测量及成果输出。硬件: 高配置台式计算机,主跑机 5 台,助跑机30 台,均用于数据处理。3. 1. 2 技术路线
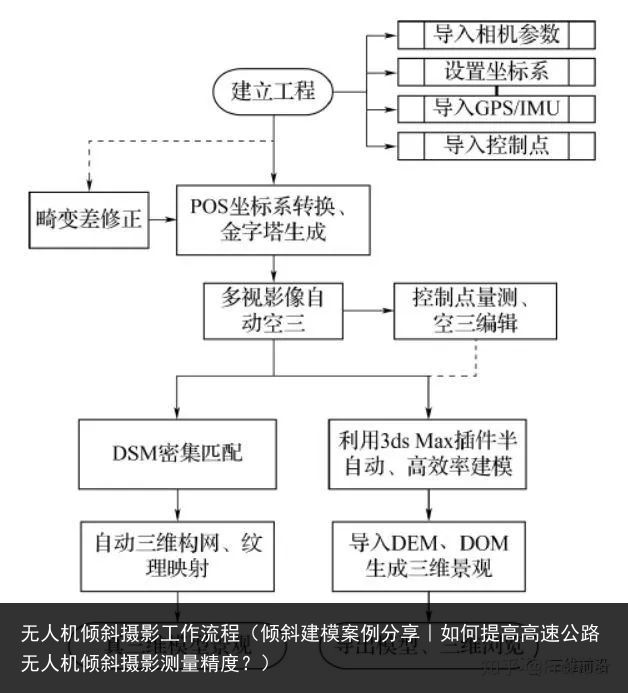
采用厦门致睿智控的 ZR-Smart 软件,以光束法局域网平差空中三角测量进行实景三维模型建立,其技术路线如图 2 所示。

▲图 2 固定翼实景三维模型建立流程
3. 1. 3 关键技术
实景三维模型建立区域所有倾斜摄影影像必须全部参与空中三角测量平差计算,按规范布设,并采用 GNSS RTK 测量模式测量的像控点全部参与空中三角测量平差计算,每张像片( 包括倾斜影像) 的外方位元素使 用 POS 数据处理结果进行计算。
3. 2 实景三维模型建立成果
本项目采用 ZR-Smart 进行实景三维模型成果输出,输出的数据格式为 OSGB 格式。所生成模型成果带有 WGS 坐标系统,能精确匹配真实地理位置,模型比例准确。提交的模型成果为该项目建立的统一的坐标系统模型成果。
3. 3 存在问题
(1) 位于海拔较低的村庄建筑物区域拉花现象严重、纹理不真实。
(2) 村庄建筑物区模型精度较差。
3. 4 原因分析
3. 4. 1 地形的影响造成了像片分辨率的降低
为了保证无人机的安全,按规范飞行高度应高于摄区和航路上最高点 100 m 以上,生产实践中考虑到误差影响及突然新增的风力发电设备、高压输电线路等危险源影响,飞行高度应高于摄区最高点 200 m 以上。以第 11 个村庄为例进行分析。
相对航高为 h = 717. 2 m,第 11 个村庄海拔为 1388 m,其所在摄区的平均海拔为 1497 m,摄区最高点海拔为 2317 m,相对高差 820 m,考虑规范及安全因素后的相对航高为 1020 m,绝对航高为 2517 m,这 时 获 取 像 片 的 实 际 分辨率为0. 14 m。即由于摄区地形的影响造成了像片分辨率的降低。
3.4.2纹理复杂区域实景三维建模需要较高的影像分辨率
对纹理复杂的村庄建筑物进行倾斜摄影测量实景三维建模生产实践可行的地面 分辨率为0. 05 m。
3. 5 解决措施
( 1) 利用旋翼倾斜无人机可在小范围降低相对航高、提高地面分辨率的优势,对村庄小范围进行倾斜摄影测量补飞。
( 2) 在条件许可的情况下( 如专业技术及人力资源均有保障、甲方提出需求等) 可进行建筑物模型单体化。
4 拟建项目方法改进及精度提高
4. 1 拟建项目方法改进
针对存在问题,采用厦门致睿智控生产的ZR-M66六旋翼倾斜无人机,DM-5 Pro五镜头倾斜摄影云台相机,以优于 0. 05 m 分辨率对拟建高速公路沿线 13 个村庄重新进行倾斜摄影,获取倾斜摄影影像及 POS 数据采集,获取倾斜摄影像片 13 630 片。

4. 2 影像质量
( 1) 影像清晰,层次丰富,反差适中,色调柔和,能辨认出与地面分辨率相适应的细小地物影像。
( 2) 影像无烟、面积反光、污点等缺陷。
( 3) 曝光瞬间造成的像点位移小于1个像素。
( 4) 拼接影像无明显模糊、重影和错位现象。
4. 3 数据处理
数据处理采用 Smart3D 软件和其他相关软件,具体流程如图 3 所示。
▲图 3 旋翼实景三维模型建立流程
4. 4 模型融合关键技术
保持与第1次模型(大场景固定翼模型,简称固定翼模型) 建立的中心坐标一致且瓦片大小一致,建立第2次模型( 局部旋翼模型,简称旋翼模型) ,即可将两 个模型融合在一起,具体操作如下:
( 1) 导入范围线: 导入 1 km 范围线,与固定翼模型制作范围线一致。
2) 自动建模软件参数设置: 保持与固定翼模型制作的参数一致,即中心坐标一致、瓦片大小一致; 其余参数设置与常规方法相同。
( 3) 三维建模: 根据上述设置,计算空三,三维建模,最后导出三维模型。
( 4) 模型数据替换: 找出固定翼模型成果中的对应同名 tile 并删除,将重新制作的村庄模型的8 个工程文件中的新 tile,按照正确序号导入固定翼模型成果中。
( 5) 串模型: 使用武汉天际航公司开发的串工具程序,重新生成新的格式为 OSGB 的目录文件即可。
4. 5 精度提高
4. 5. 1 影像清晰度提高
通过采用旋翼无人机降低相对航高后,对村庄进行倾斜摄影测量建立的实景三维模型表现出影像清晰、无拉花现象、纹理真实的特征,如图 4所示 (左为原固定 翼模型效果,右为旋翼模型效果) 。

▲图 4 影像清晰度提高对比
4.5.2 数学精度提高
以采用 GNSS RTK 测量模式对分布于 5 个村庄的 23 个明显地形地物特征点实测三维坐标值为理论值,以固定翼模型、悬翼模型地形地物特征点三维坐标值为检查值,求出误差中误差进行精度统计,见表 1。
表 1 数学精度统计表 mm

从表 1 可以看出,悬翼模型点位中误差与高程中误差均高于固定翼模型点位中误差和高程中误差,平面精度提高佰分率为 70%,高程精度提高百分率为 75%。
用数学精度统计表中的统计数据制作点位中误差柱状图( 如图 5 所示) 及高程中误差精度统计柱状图( 如图 6 所示) ,更能直观地看出其精度提高的效果。
▲图 5点位中误差柱状图
结语
根据拟建云南高速公路呈带状狭长走势,地形地貌复杂多变,相对高差较大,除分布地形区外,在峡谷底部还有大量村庄建筑物区分布的特点; 先利用固定翼无人机续航时间长、工作效率高、航摄像片少的优势进行大面积倾斜摄影测量,再利用旋翼无人机降低航高,以优于 0. 05 m 的分辨率对建模区分布的 13 个村庄重新进行倾斜摄影测量及实景三维模型建立,并将两个模型进行融合,得到了消除位于高山峡谷底部的村庄建筑物区模型模糊、拉花、纹理不真实、精度差等现象的良好效果。根据本项目经验,为了便于模型融合,两次倾斜摄影测量野外作业最好同时开展,否则时间差越小越好,确保两次倾斜摄影时地类没有发生改变是最理想的结果。
文章来源:《测绘通报》 文章作者:陈志华,张俊贤,张克铭,史华林
更多倾斜建模、激光点云前沿资讯,关注“三维前沿”



