

大疆精灵4rtk测量地形图(大疆精灵4-RTK无人机狭长条带型测区的无地面控制点定位精度实验)
摘要:本文通过实验,验证精灵4-RTK无人机狭长条带型测区的无地面控制点定位精度,探索无地面控制点条件下公路、铁路、河流以及电力线廊道等条带测区高精度成图的可行性。实验结果表明,条带型测区可采用多个架次联合解算的作业模式,成图精度与常规区块状测区基本一致,作业方法并无明显不同,适用一般区块状测区所取得的实验结论。
选取图1所示的实验区,线路长度约12.15km,宽度约2.4km,地形平坦,高差约40m。
 图1 测区及航线敷设示意图
图1 测区及航线敷设示意图航线沿线路方向分段敷设,由3条航线覆盖线路及两侧。航向重叠度约80%,旁向重叠度约50%,相对地面航高约200m,影像空间分辨率约5cm。每段线路采用一个独立架次,共计12个架次,累计获取有效影像1246幅。
按照图2所示,在测区内布设27个像控点。
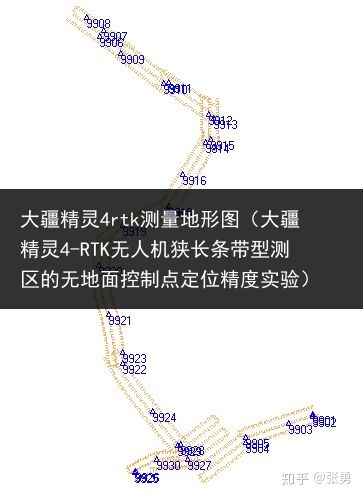 图2 像控点布设示意图
图2 像控点布设示意图控制点选择在明显地物拐角处,影像和野外均能明确判读其点位。
 图2 像控点示意图
图2 像控点示意图像控点的三维坐标通过GNSS-RTK设备测量,结果保存为CGCS2000投影坐标,高程基准为大地高。
空中三角测量处理前,利用PhotoScan软件检校出了相机内参数和镜头畸变参数。空中三角测量处理时,12个架次合并为一个加密区,将jpg文件中存储的经纬度坐标、影像匹配获取的连接点坐标以及人工观测的控制点像点坐标视作观测值(所有控制点均用作检查点,三维坐标未参与平差解算),经光束法平差(GNSS平面权取0.1,高程权取100.0)求解影像外方位元素、加密点三维坐标和控制点加密坐标。光束法平差后测区如图4所示。
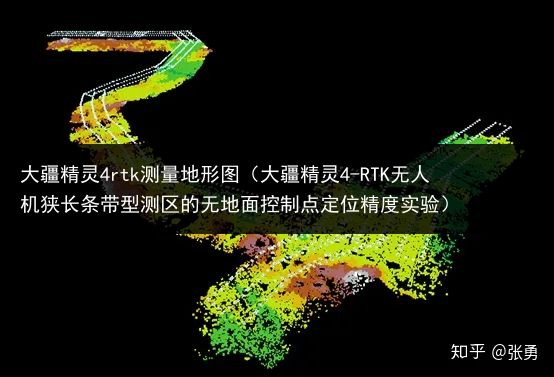 图4空中三角测量结果示意图
图4空中三角测量结果示意图为了评定空中三角测量成果的几何定位精度,实验求取了控制点外业实测坐标与加密坐标之差,差值越小代表几何定位精度越高。表1列出了所有控制点外业实测坐标与加密坐标之差。

从表1可以看出,控制点平面X、Y方向的中误差分别为0.04m和0.03m,高程中误差为0.07m,满足CJJ/T 8-2011 《城市测量规范》关于1:500 DLG(平地、丘陵地)地物点平面位置中误差不应大于0.25 m、高程位置中误差不应大于0.15m的规定。进一步分析表1可以发现,高程误差超过3倍中误差的点为9920(0.21m),超过2倍中误差的点为9901(0.18m),有必要进行外业复测,但是受实验条件所限,未能实地复测。如果将9901和9920看作粗差,在评估精度时不予考虑,那么高程中误差为0.04m,远优于《城市测量规范》关于1:500 DLG精度的相关规定。
结论:本文通过实验验证了狭长条带测区的几何定位精度,验证了多架次合并处理的可行性,结果表明,未发现无地面控制点定位方法在区块状测区和条带状测区上存在差异性,狭长条带并未对几何定位精度产生不利影响,故而认为基于精灵4-RTK无人机影像的无地面控制点定位方法在公路、铁路、河流以及电力线廊道等条带测区的高精度成图方面是可行的。




